Lanzamiento del satélite IRNSS-1D (PSLV C27)
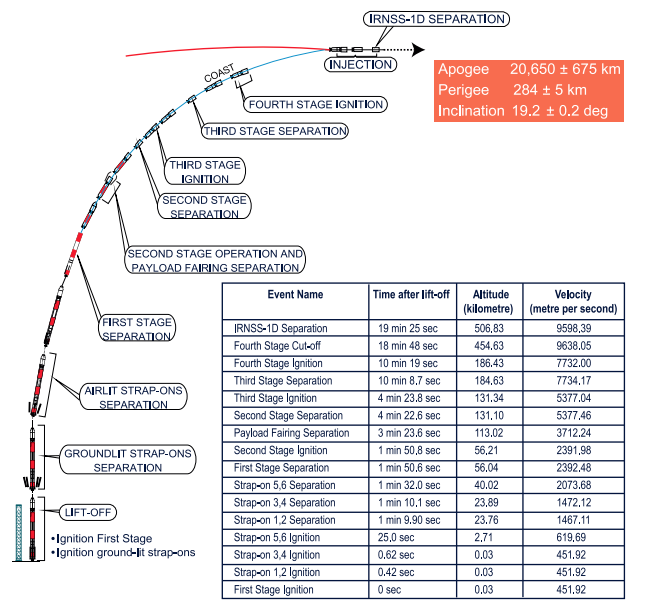
La agencia espacial india (ISRO) sigue adelante con sus planes para desplegar su propio sistema de posicionamiento local. El 28 de marzo de 2015 a las 11:49 UTC despegó un cohete PSLV-XL (misión PSLV C27) desde el Complejo de Lanzamiento FLP (First Launch Pad) del Centro Espacial Satish Dawan en la isla de Shriharikota con el satélite IRNSS-1D. Se trata del primer lanzamiento indio de 2015. La órbita inicial del IRNSS-1D era una órbita de transferencia subgeosíncrona (sub GTO) de 284 x 20 650 kilómetros y 19,2º de inclinación.

IRNSS-1D
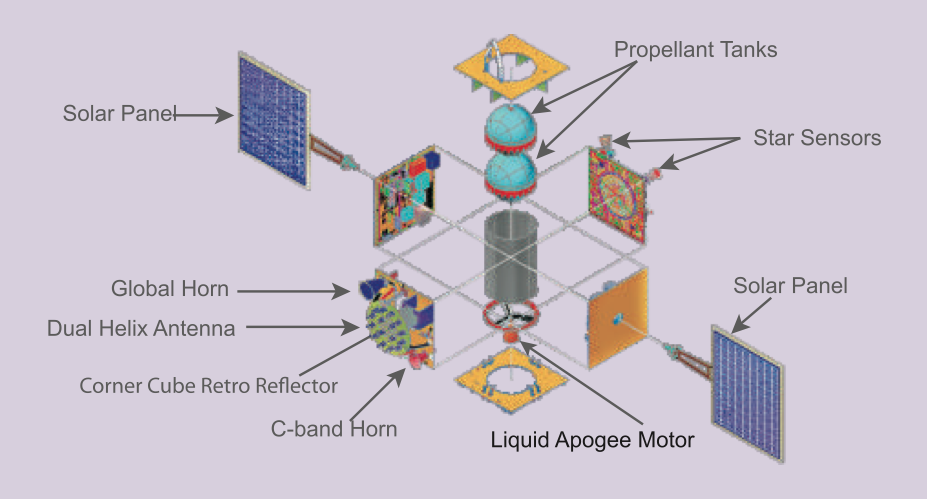
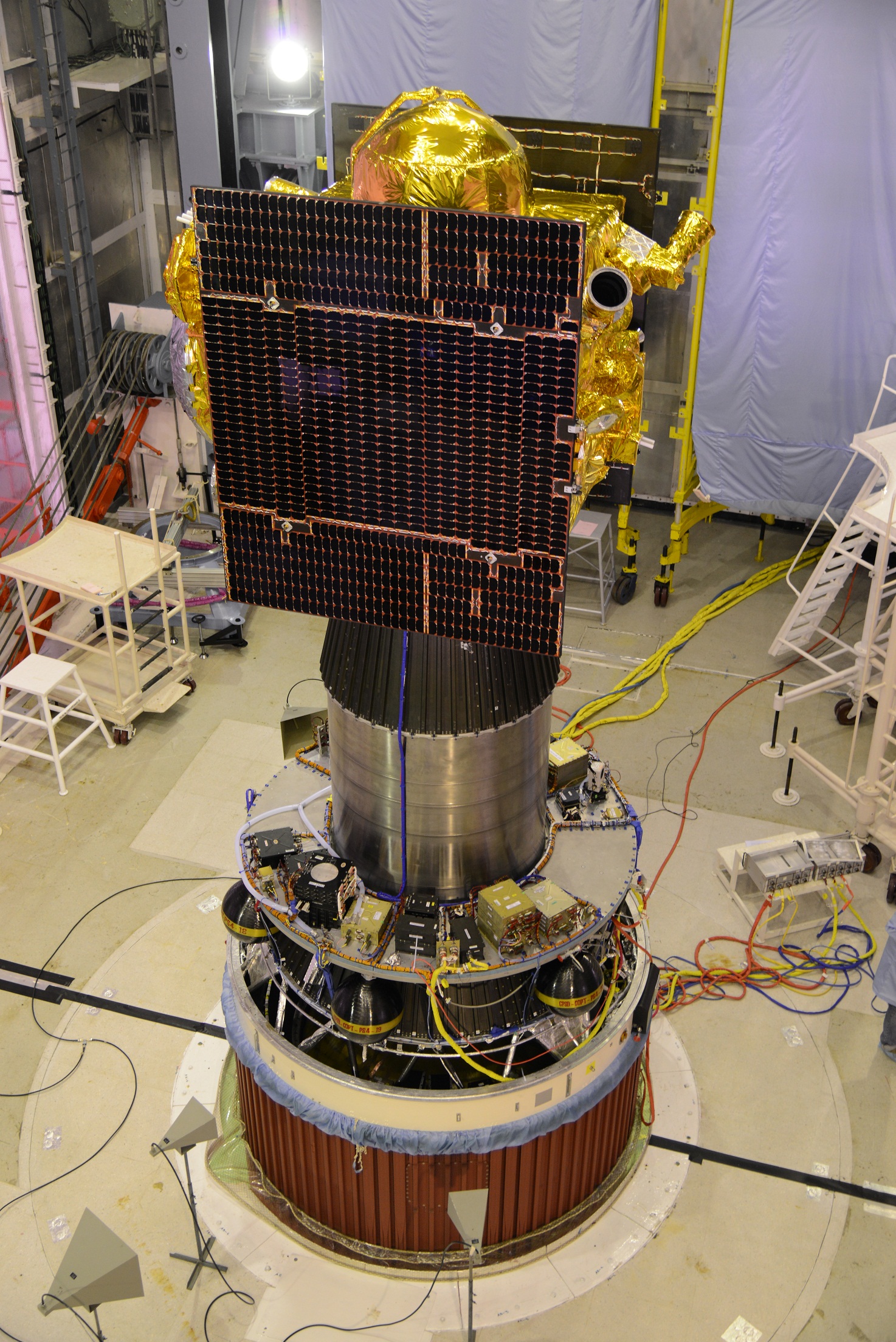
El IRNSS-1D (Indian Regional Navigation Satellite System) es el cuarto satélite del posicionamiento local indio IRNSS. Tiene 1425,4 kg (600,1 kg sin combustible) y ha sido construido por la agencia espacial india ISRO usando la plataforma I-1000. Tiene unas dimensiones de 1,58 x 1,50 x 1,50 metros y posee dos paneles solares que generan un mínimo de 1660 W. Estará situado en una órbita geoestacionaria con una longitud de 83º este. El sistema de propulsión está compuesto por un motor principal LAM (Liquid Apogee Motor) de 440 N de empuje y doce pequeños propulsores de 22 N. Su vida útil se estima en doce años. Estará situado en la posición 111º este.

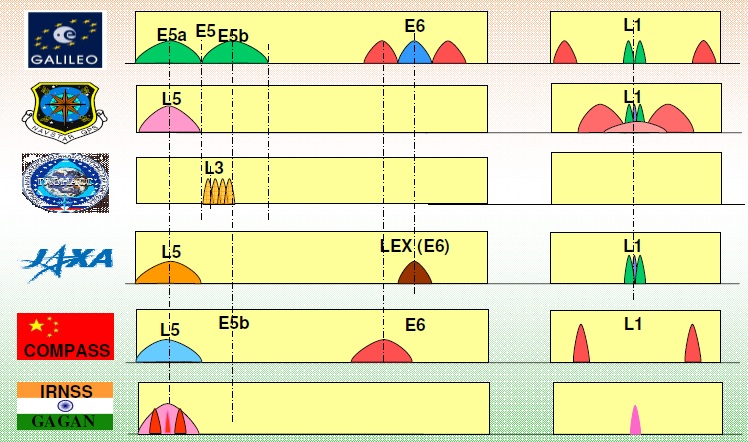
El satélite lleva dos tipos de carga útil: una carga de navegación y otra de medición. El sistema de navegación transmitirá en la banda L5 (1176,45 MHx) y banda S (2492,028 MHz). Para garantizar la precisión de la señal, el IRNSS-1D usa un reloj atómico de rubidio. Para determinar la posición del satélite se usa un transpondedor en banda C y varios retrorreflectores láser.
El IRNSS-1D es el cuarto satélite de la constelación india IRNSS (Indian Regional Navigation Satellite System), una constelación que el gobierno indio tiene previsto completar antes de finalizar la década. El sistema IRNSS es un sistema de posicionamiento local diseñado para complementar al GPS norteamericano y el futuro Galileo europeo sobre territorio indio. El sistema IRNSS permitirá aumentar la precisión del GPS en la India y es similar a otros sistemas de posicionamiento local como el QZSS japonés. Ofrecerá una señal militar (Restricted Service) y otra civil (Standard Positioning Service), con una precisión superior a los unos veinte metros en territorio indio.
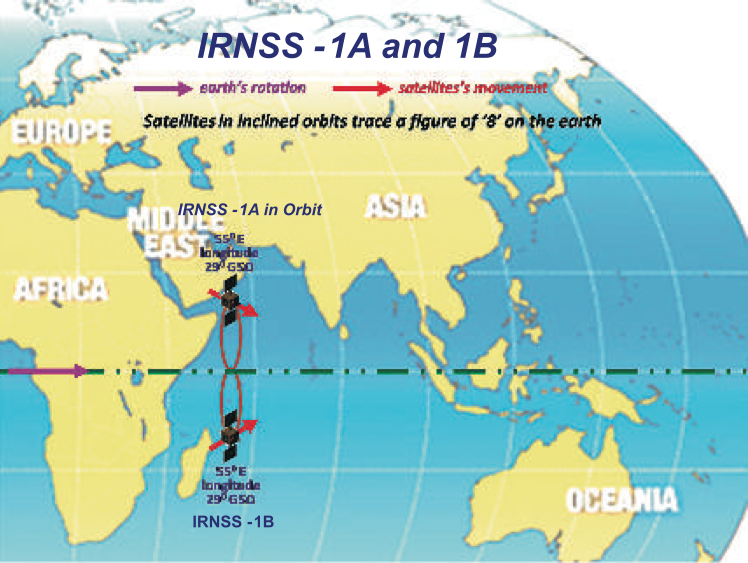
La constelación estará formada por un total de siete unidades, tres satélites localizados en órbita geoestacionaria -es decir, sobre el ecuador (longitudes 34º, 83º y 132º este)- y cuatro en una órbita geosíncrona inclinada 27º-29º (que cruzarán el ecuador en las longitudes 55º y 111º este). Los satélites geosíncronos trazan en el cielo una figura en forma de ‘8’ vistos desde la superficie, mientras que los geoestacionarios están relativamente inmóviles. El 1 de julio de 2013 se lanzó el primer satélite de la constelación, el IRNSS-1A y el 4 de abril de 2014 despegó el IRNSS-1B, ambos geosíncronos. El IRNSS-1C es el primer ejemplar del sistema situado en una órbita geoestacionaria.

Cohete PSLV
El PSLV (Polar Satellite Launch Vehicle) es un cohete de cuatro etapas que combina de forma alterna fases de combustible sólido y líquido, además de aceleradores de combustible sólido (PS0M) en la primera etapa. Tiene una longitud de 44,4 metros y una masa de 320 toneladas al lanzamiento. La versión PSLV-XL tiene capacidad para colocar 3800 kg en órbita baja (LEO) y 1300 kg en órbita de transferencia geoestacionaria (GTO).



La primera fase (PS-1 ó S-138), de 20,34 x 2,8 m, es uno de los cohetes de combustible sólido más potentes del mundo, con un empuje de 4430 kN (4819 kN en el vacío) y 269 segundos de impulso específico. El combustible consiste en 138 toneladas de polibutadieno (HTPB) y el fuselaje está fabricado en acero. El control de guiñada y cabeceo se consigue mediante un ingenioso sistema de inyección de una solución acuosa de perclorato de estroncio en la tobera. El líquido se almacena en contenedores cilíndricos pegados a la base de la primera etapa con la apariencia de pequeños cohetes de combustible sólido. Este sistema de control se denomina SITVC (Secondary Injection Thrust Vector Control System). La primera fase funciona durante 102 segundos.

El PSLV incorpora seis cohetes de combustible sólido PS0M-XL (con un motor S-12). Estos cohetes aceleradores tienen unas dimensiones de 9,99 x 1 m y un empuje de 716 kN cada uno, con 12 toneladas de HTPB de combustible. En las misiones con cohetes PS0M, cuatro de ellos se encienden durante el lanzamiento y dos restantes 25 segundos después. El tiempo total de ignición es de 49,5 segundos.

La segunda etapa (PS2 o L-40) tiene unas dimensiones de 12,8 x 2,8 metros y utiliza una carga de combustible hipergólico consistente en 41,7 toneladas de tetróxido de nitrógeno y UH25 (una versión de la hidrazina). Emplea un motor Vikas de 724 kN de empuje (804 kN en el vacío). Este motor se trata en realidad de un Viking 4 europeo empleado en el Ariane 4 y fabricado en la India bajo licencia. La segunda etapa funciona durante 149 segundos.

La tercera etapa (PS3 o S-7) emplea 7,6 toneladas de HTPB y tiene un empuje de 242 kN. Sus dimensiones son de 2,0 x 3,6 metros. Su chasis es de fibra epoxi con Kevlar y la tobera puede moverse ±2° para el control en guiñada y cabeceo. Para el control de giro se usa el sistema de control a reacción (RCS) de la cuarta etapa. Funciona durante 112,1 segundos.
La cuarta etapa (PS4 o L-2.5) usa 0,82 toneladas de una mezcla de varios óxidos de nitrógeno (MON-3) y MMH. Sus dimensiones son de 2,8 x 2,6 metros y tiene dos motores de 7,3 kN cada uno. Cada tobera puede moverse ±3°. El sistema de navegación inercial del cohete se encuentra en la cuarta etapa. Funciona durante 513 segundos. La cofia tiene un diámetro de 3,2 metros.
El centro espacial de Satish Dhawan (SHAR) tiene dos rampas de lanzamiento para el PSLV denominadas First Launch Pad (FLP) y Second Launch Pad (SLP). La situación del centro, con una latitud de sólo 13,5º N, permite a la ISRO aprovechar casi todo el potencial de sus lanzadores. El PSLV se integra en vertical en el VAB (Vehicle Assembly Building) y luego se transporta sobre la plataforma móvil MLP (Mobile Launch Pedestal) a la rampa, a un kilómetro del VAB, aproximadamente. El MLP se mueve a una velocidad de 7 metros por minuto. Una vez en la rampa se conecta a la torre umbilical fija UT (Umbilical Tower). El PSLV se puede lanzar con un azimut de 102º para lanzamientos a una órbita de transferencia geoestacionaria (GTO) o de 140º para lanzamientos a órbitas polares. Debido a que el azimut de la rampa es de 135º, es necesaria una maniobra de giro del vehículo tras el despegue.
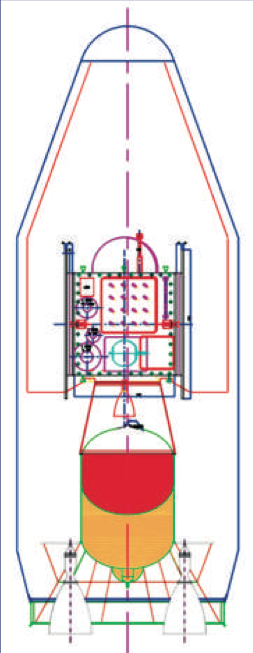
Inserción en la cofia:

Lanzamiento:



Vídeo sobre el lanzamiento:


Comentarios
Publicar un comentario