La odisea de Spirit y Opportunity, los infatigables exploradores marcianos (10 años de los MER)
Enero de 2004. Millones de personas a lo largo y ancho de todo el mundo estábamos pegados a nuestros ordenadores -por entonces no había muchos dispositivos móviles conectados a internet- para seguir el aterrizaje en Marte de dos pequeñas naves de la NASA, los rovers Spirit y Opportunity. Ambas sondas, lanzadas el año anterior, descendieron en el planeta rojo con pocas semanas de diferencia. El mundo entero cruzó los dedos mientras los intrépidos aventureros robóticos se dirigían a su destino. Hoy en día aterrizar en Marte nos parece algo casi rutinario, como de andar por casa, pero en 2004 solamente tres sondas de la NASA habían logrado llevar a cabo esta hazaña con éxito. Contra todo pronóstico, los dos rovers aterrizaron de una pieza. La misión primaria de los dos vehículos debía durar noventa días, pero todos -incluidos los encargados de la misión- habrían estado más que satisfechos con un mes de funcionamiento, tan bajas eran las expectativas. Una década más tarde, Opportunity sigue rodando por Marte. Esta es la historia de los MER (Mars Explorarion Rovers), las sondas que cambiaron nuestra visión de Marte

Los comienzos
1999 fue el annus miserabilis del programa de exploración marciana de la NASA. Las sondas Mars Climate Orbter y Mars Polar Lander se perdieron con pocos meses de diferencia. En el caso de la primera, la comisión de investigación reveló que el accidente había sido debido a una humillante confusión entre unidades de medida métricas y anglosajonas. Durante meses la NASA fue objeto de burla y escarnio. Después de los éxitos de la Mars Pathfinder y la Mars Global Surveyor de 1997, Marte volvía a cobrarse su cuota habitual de víctimas robóticas. Las dos sondas formaban parte del programa -mejor dicho, eran el programa- Mars Surveyor 98 de la NASA y su desaparición obligó a replantearse toda la estrategia de exploración del planeta rojo. El programa Mars Surveyor había nacido siguiendo las directrices faster, better, cheaper del administrador de la NASA Dan Goldin, pero la desaparición de la Polar Lander y la Cilmate Orbiter mostraron a las claras que cheaper no siempre es better.
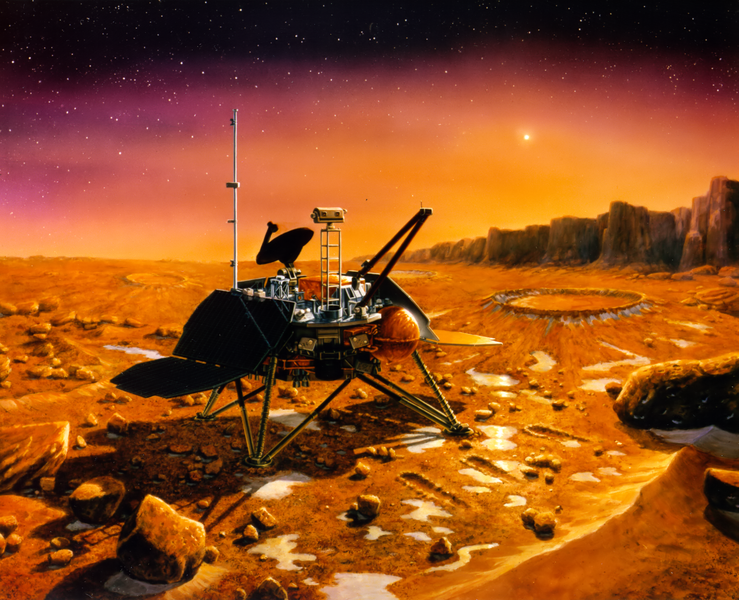
En 1999 el programa Mars Surveyor tenía unos objetivos ciertamente más que ambiciosos. De acuerdo con el plan original, en 2001 estaba previsto lanzar otras dos naves, el Mars Surveyor Orbiter 2001 y el Mars Surveyor Lander 2001. El Mars Surveyor Lander 2001 era una sonda basada en el diseño de la Mars Polar Lander, pero más compleja. Tenía que haber despegado en abril de 2001 con el fin de aterrizar en Marte a principios de 2002. La sonda llevaría dos novedosos paneles solares circulares y, lo más llamativo, un nuevo vehículo con ruedas que descendería a la superficie colgado del brazo robot. El rover estaba basado en el prototipo FIDO (Field Integrated Design and Operations) del JPL de la NASA, un vehículo robot de un metro de alto y 0,5 metros de ancho construido a partir de la experiencia adquirida con el pequeño rover Sojourner que llevaba la Mars Pathfinder. En abril de 1999, FIDO exploró la superficie del desierto de Mojave para probar la idoneidad de su diseño. Pronto haría lo mismo en Marte.

FIDO tenía un mástil desplegable con cámaras situado casi a la altura de los ojos de un adulto. Por primera vez podríamos ver Marte como si estuviéramos paseando por el planeta rojo. Usaba la misma suspensión y el mismo conjunto de seis ruedas de Sojourner, pero de mayor tamaño, de tal forma que sería capaz de superar obstáculos de hasta 30 cm de alto. También incorporaba un brazo robot -curiosamente situado en el lado opuesto a donde estaba el mástil con cámaras- y un pequeño taladro localizado en la parte inferior del rover. FIDO llevaría un conjunto de instrumentos científicos denominado Athena, de ahí que a este rover a veces se le conozca por este nombre. Los instrumentos Athena incluían un espectrómetro de rayos X mediante partículas alfa (APXS) situado en el extremo del brazo robot, un espectrómetro infrarrojo, un espectrómetro Mossbauer y hasta 14 cámaras.

La NASA planeaba lanzar dos rovers FIDO. Uno, como vimos, en la misión Mars Surveyor Lander 2001 y otro con la Mars Surveyor Lander 2003 (las ventanas de lanzamiento a Marte tienen lugar cada dos años aproximadamente, de ahí las fechas). El rover de 2001 llevaría el conjunto de instrumentos APEX (Athena Precursor Experiment), básicamente una versión simplificada de los instrumentos Athena. El rover Athena de 2003 podría ser ligeramente más grande -este punto estaba aún sin decidir- y se encargaría de recoger rocas de la superficie de cara a una misión de recogida de muestras que tendría lugar en 2005. Esta misión estaría compuesta por una nave dotada de un pequeño cohete que mandaría las muestras a una órbita baja marciana, donde serían recogidas por otra sonda para traerlas a la Tierra. Evidentemente, estos planes eran demasiado ambiciosos -y caros-, sobre todo la misión de retorno de muestras, así que pronto surgieron retrasos y cancelaciones. En 1999 ya se había decidido posponer el rover FIDO a la misión Surveyor de 2003. En su lugar, la sonda Mars Surveyor 2001 llevaría el pequeño rover Marie Curie, similar al Sojourner de la Mars Pathfinder.

Pero la gran debacle marciana de 1999 lo cambió todo. La NASA decidió reaccionar ante lo que consideraba una afrenta a su imagen internacional y decidió cancelar el programa Mars Surveyor. La primera en desaparecer fue la misión de retorno de muestras y, con ella, el rover Athena. No hubo un anuncio oficial de cancelación y, de hecho, mucha gente no se enteró hasta años después de que el proyecto había muerto (así funciona la NASA). Pero, ¿y ahora qué? Porque la agencia espacial había invertido mucho tiempo y dinero en las misiones Surveyor. El caso más sangrante era el de la Mars Surveyor Lander 2001, que ya estaba en proceso de construcción. El equipo de esta misión peleó con todas sus fuerzas para que se pudiera lanzar en 2001, incluyendo en el montaje las recomendaciones de la comisión de investigación de la Polar Lander. Pero la dirección de la NASA se negó rotundamente. En 2001 solamente despegaría la Mars Surveyor Orbiter 2001, que pronto sería bautizada como Mars Odyssey, una misión menos arriesgada. No se intentaría ninguna misión de aterrizaje hasta 2003, como muy pronto, para que la NASA tuviese tiempo suficiente de planificar metódicamente el siguiente paso.
La agencia sopesó varias opciones. La primera, lanzar la Mars Surveyor Lander en 2003 con el rover APEX, era la más lógica y barata, pero también era una apuesta arriesgada, al igual que lo era la propuesta de lanzarla en 2002 y hacerla pasar por Venus para permitir un aterrizaje en 2003, es decir, lo antes posible. ¿Y si los fallos de diseño de la Polar Lander, muchos de ellos aún desconocidos, habían sido trasladados a esta misión? Al fin y al cabo, ambas sondas compartían un diseño común. De ser así, la NASA se enfrentaba a la posibilidad de hacer el ridículo otra vez. La agencia tomó la decisión de desechar la Surveyor 2001 para siempre (aunque, tras varios giros del destino bastante tortuosos, terminaría por volar en 2007 como la misión Phoenix). La opción más barata y segura era lanzar otro orbitador, que incorporaría los instrumentos de la desaparecida Climate Orbiter y otros similares a los de la exitosa Mars Global Surveyor. Este proyecto sería denominado Mars Science Orbiter (MSO) y durante un tiempo fue considerada una alternativa sólida a una misión de aterrizaje. También se propuso lanzar una misión de pequeñas sondas para el estudio del interior de Marte, pero la experiencia de 1999 había enseñado que las naves pequeñas pueden ser menos robustas (la Polar Lander llevaba varias subsondas denominadas Deep Space 2 que desaparecieron sin dejar rastro). Y, por otro lado, había poco tiempo para diseñar una nave desde cero.
En febrero de 2000 surgió la semilla de lo que terminaría siendo el programa MER. El equipo científico del rover Athena y APEX, dirigido por Steve Squyres, tenía otra idea acerca del futuro de la exploración de Marte. Mientras la mayor parte de equipos de la NASA se habían centrado en intentar mejorar las naves Surveyor construidas por Lockheed-Martin, ¿por qué no usar algo que ya sabían que funcionaba a la perfección? Varios grupos del centro JPL de la NASA propusieron mandar en 2003 una misión similar a la Mars Pathfinder de 1997. El sistema de aterrizaje, basado en una curiosa combinación de paracaídas, airbags y retrocohetes, había sido un éxito. Entonces, ¿por qué no usarlo? El problema era decidir la carga útil. Barry Goldstein, del equipo de Squyres, sugirió entonces mandar un rover Athena dentro de la estructura de aterrizaje de la Pathfinder. La idea era tan elegante y sencilla que todos los implicados vieron inmediatamente que esta propuesta era justo lo que la NASA estaba buscando.
El concepto sería conocido de forma informal como Athena-in-bags, haciendo referencia a los airbags del sistema de aterrizaje. A pesar de su nombre, el rover no usaría los instrumentos de Athena, sino el conjunto APEX que ya había sido construido y probado para el rover de 2001. Desgraciadamente, el sistema de Pathfinder no había sido diseñado para una carga útil tan pesada. Habría que rediseñar por completo el paracaídas y el conjunto de airbags, entre otros sistemas, para garantizar un aterrizaje exitoso. Pero no había ni tiempo ni dinero. De pronto, la propuesta del orbitador MSO, también apodado Gavsat, comenzó a verse como una opción ganadora para la ventana de lanzamiento de 2003. En abril de 2000, Mark Adler y su equipo del JPL tuvieron otra idea. Si el rover Athena original no cabía dentro del sistema Pathfinder, ¿por qué no diseñar un nuevo rover? Al fin y al cabo, lo difícil era construir un sistema de aterrizaje fiable. El nuevo rover, denominado Athena-Pathfinder, no incorporaría todos los instrumentos APEX/Athena, pero sí los más importantes, incluyendo las cámara estereoscópicas Pancam, los espectrómetros Mössbauer, APXS y Mini-TES, así como un pequeño microscopio para ver las rocas de cerca. El taladro Mini-corer sería sustituido por el instrumento RAT (Rock Abrasion Tool), menos sofisticado, pero que dejaría al descubierto parte del interior de las rocas para ser analizados por el resto de instrumentos. La mayor pérdida sería el espectrómetro Raman, una herramienta fundamental para entender la composición mineralógica de las rocas marcianas y detectar posibles sustancias orgánicas. Con el fin de aligerar la masa de la misión también se optó por prescindir de un instrumento meteorológico, una decisión que fue muy criticada por algunos sectores de la comunidad científica.
Pero había que decidirse, y rápido. Si querían que la misión despegase en 2003, la NASA debía aprobar esta loca propuesta ya mismo. En mayo de 2000 el director del JPL, Edward Stone, apoyó oficialmente la propuesta Athena-Pathfinder como una misión del JPL, aunque le cambió el nombre a Mars Geologist Pathfinder (MGP), haciendo hincapié en el potente conjunto de instrumentos que exploraría la superficie marciana. La misión tendría a Peter Theisinger como encargado del proyecto y a Steve Squyres como investigador principal del paquete de instrumentos Athena. El 13 de mayo de 2000 la NASA anunció que la misión de 2003 sería el Mars Mobile Pathfinder (MMP) -sí, le habían cambiado el nombre una vez más- o el orbitador MSO. Poco después el rover sería rebautizado otra vez como Mars Geologic Pathfinder (MGP).
Por fin, en julio de 2000 la NASA anunció la selección del rover para la misión de 2003 con el nombre de Mars Exploration Rover (MER). Afortunadamente, ya no habría más cambios de nomenclatura. Contra todo pronóstico, el administrador Dan Goldin decidió modificar el proyecto a última hora y sugirió lanzar dos naves idénticas en 2003, una maniobra que sin duda pretendía garantizar el éxito de al menos uno de los rovers. El equipo del MER estaba encantado con la idea, pero el Congreso se opuso. Lanzar dos robots saldría por 645 millones de dólares en vez de los 440 millones planeados para un sólo vehículo, y que en sí ya suponían un incremento considerable con respecto a los 260 millones que originalmente debía costar la misión de 2003.

La batalla por la financiación duró varias semanas, pero en esta ocasión Goldin contaba con la ayuda inestimable de la mecánica celeste. La ventana de lanzamiento de 2003 sería la más favorable en 18 años, nada más y nada menos, lo que permitiría lanzar una misión tan pesada mediante un cohete Delta II. O los MER se lanzaban en esa fecha o habría que cancelar la misión para siempre. En esta ocasión no había marcha atrás. Finalmente, el Congreso cedió ante la geometría celeste. Se lanzarían dos rovers, pero siempre y cuando el presupuesto total no superase los 688 millones.


Los rovers
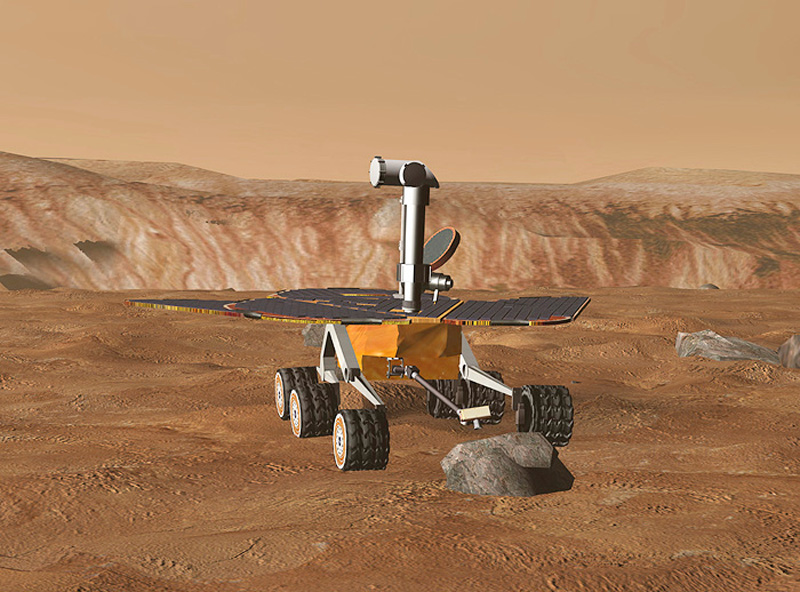
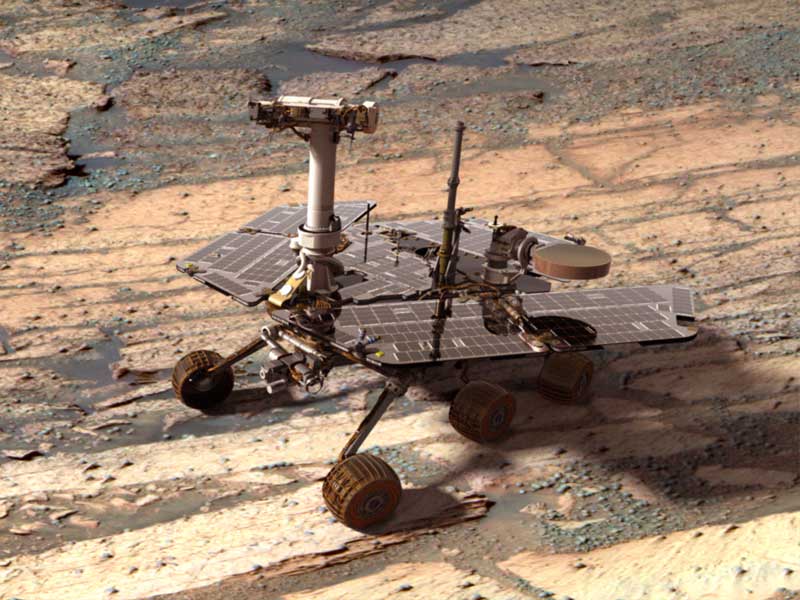
Comparado con el pequeño Sojouner de 10 kg, los MER serían imponentes. Su masa alcanzaría los 174 kg y tendrían una altura de 1,5 metros una vez desplegado el mástil con las cámaras. La base de las ruedas tenía unas dimensiones de 1,4 metros de largo y 1,2 metros de ancho. Con los paneles solares desplegados, las dimensiones alcanzaban los 2,25 x 1,7 metros. La altura entre la parte inferior del chasis y el suelo era de 30 cm. Por supuesto, los rovers usarían el mismo mecanismo de suspensión de seis ruedas que Sojourner y el prototipo FIDO, aunque a mayor escala. Las seis ruedas, de 26 cm de diámetro y 16 cm de ancho cada una, estaban fabricadas en aluminio y disponían de su propio motor eléctrico. Los pares delantero y trasero podían rotar para permitir que el rover girase sobre sí mismo. Los MER fueron diseñados para avanzar tanto hacia ‘delante’ como hacia ‘atrás’ si el terreno o la misión así lo requerían, moviéndose a una velocidad máxima de 4,6 cm/s, aunque la velocidad ideal no superaría 1 cm/s. Cada vehículo podría circular por pendientes de hasta 45º sin volcar, aunque por motivos de seguridad el software bloquearía cualquier intento de atravesar pendientes de más de 30º de inclinación.
Puesto que la temperatura nocturna en Marte puede descender hasta los -105º C, cada rover incorporaría varios calefactores eléctricos y ocho calefactores a base de plutonio-238. Los ocho RHU (Radioisotope Heater Unit) llevaban cada uno 2,7 gramos de dióxido de plutonio y servían para garantizar que la temperatura de la electrónica no bajase a menos de -55º, o -20º C en el caso de las dos baterías de ión litio que transportaba cada vehículo. La temperatura óptima de funcionamiento estaba en el rango -40º C a 40º C. Cada rover dispondría de un único ordenador principal con un microprocesador Rad 6000 de 32-bit y 20 MHz, una versión a prueba de radiación de un chip comercial PowerPC, dotado de una memoria RAM de 128 MB y 256 MB de memoria flash, que usaría una versión del sistema operativo VxWorks. El diseño del ordenador y su software supuso un auténtico quebradero de cabeza, ya que debería dirigir la nave durante el vuelo hasta Marte, controlar la secuencia de aterrizaje, y posteriormente, conducir el rover por la superficie. Lo ideal habría sido tener dos ordenadores, uno para la fase de crucero y descenso, y otro para las operaciones de superficie, pero el exceso de masa era un lujo que esta misión no se podía permitir.

El diseño de los paneles solares fue otro desafío. Los encargados de la misión habían concebido el rover para que pudiese sobrevivir al menos un mes en la superficie marciana. Pero la NASA había decidido que, debido a su coste, la misión MER debería cumplir con los Requisitos de Nivel Uno de la agencia, lo que implicaba una duración mínima de 90 días. ¿Cómo lograrlo? El principal impedimento eran los paneles solares. La misión Pathfinder, que había sido la primera nave en usar paneles solares en la superficie de Marte, experimentó cómo la eficiencia de los mismos se degradaba progresivamente por culpa del polvo en suspensión de la atmósfera marciana, que se depositaba lenta, pero inexorablemente sobre los mismos. Para garantizar una misión de Nivel Uno, el equipo de los MER tenía que aumentar la superficie de paneles solares y contrarrestar así los efectos del polvo, o bien idear algún mecanismo para limpiarlos regularmente. Esta última posibilidad se descartó por su complejidad, aunque el equipo de los MER jugó con la idea de incorporar una especie de limpiaparabrisas o mecanismos para repeler el polvo mediante campos electrostáticos, entre otros sistemas. Finalmente se incrementó el número de células fotovoltaicas después de elegir una configuración de paneles óptima.

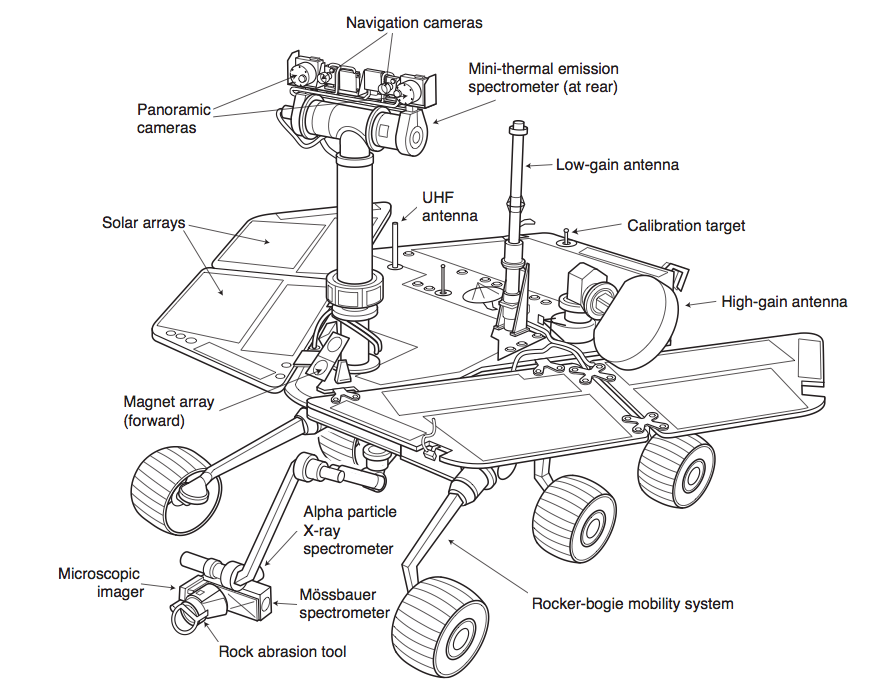
Puesto que los paneles eran plegables, la forma definitiva de los mismos recordaba a un delicado trabajo de origami más que a una nave espacial y, de paso, le daba a los rovers cierto aspecto ‘aerodinámico’ muy atractivo. La superficie total de los paneles sería de 1,3 metros cuadrados, que proporcionarían unos 900 vatios-hora de energía por día marciano o sol, una cantidad que se reduciría a 600 vatios-hora al final de los tres meses de la misión primaria (nadie esperaba por entonces que disminuiría mucho más debido a la excepcional duración de la misión). Para las comunicaciones directas con la Tierra se usaría una antena de alta ganancia de 28 cm de diámetro que podría transmitir a dos kilobits por segundo en banda X, aunque siempre que fuera posible se enviarían los datos a través de las sondas Mars Odyssey y mars Global Surveyor (y, posteriormente, las Mars Express y Mars Reconnaissance Orbiter). Por este motivo, los dos rovers disponían de sendas antenas UHF de baja ganancia para emitir datos a 128 kbits/s a través de los orbitadores.

En la parte superior del mástil se encontraba la Pancam, formada en realidad por dos cámaras idénticas separadas 30 cm con el fin de proporcionar imágenes esteroscópicas. Cada cámara, con una focal de 4,2 cm, tenía una CCD de 1024 x 1024 píxeles y una rueda de 14 filtros para tomar imágenes a todo color y realizar análisis espectroscópicos rudimentarios con un campo de 16º x 16º. Junto a la Pancam, y apuntando al lado opuesto, se encontraba el espejo del espectrómetro infrarrojo Mini-TES (Miniature Thermal Emission Spectrometer), que dirigía la luz a través del mástil hasta el instrumento propiamente dicho, localizado en el interior del chasis del rover. Además, cada rover llevaba seis pequeñas cámaras en blanco y negro. Cuatro de ellas se denominaron Hazcams (Hazard avoidance Cameras) y estaban situadas en el chasis, dos delante y dos detrás. Su objetivo era verificar que el rover no tenía ningún obstáculo cerca de las ruedas y que podía moverse libremente. Otras dos cámaras estaban localizadas junto a la Pancam y recibían el nombre de Navcam (Navigation Cameras), ya que serían usadas para planificar los movimientos del robot por la superficie.

Los rovers tenían un brazo robot de 0,75 metros de longitud y cinco grados de libertad fabricado en titanio, aunque incorporaba trozos de aluminio procedente de los restos de las torres del World Trade Center de Nueva York. En el extremo del brazo se encontraban 2 kg de instrumentos científicos distribuidos como si de una navaja multiusos de cuatro lados se tratase. Por un lado estaba el RAT, que debería limpiar las rocas de polvo y sería capaz de perforar un agujero de unos pocos milímetros de profundidad y 45 mm de diámetro gracias a unas matrices de diamante industrial móviles que giraban a 3000 revoluciones por minuto. Junto a él se encontraba el espectrómetro APXS, una aportación del instituto Max Planck alemán capaz de analizar la composición de una roca usando una pequeña cantidad de curio-244. Otro instrumento del brazo era el microscopio, dotado de una cámara de 1024 x 1024 píxeles. Pegado a una roca tendría una resolución de 30 micras y un campo de visión de 31 x 31 mm. Por último estaba el espectrómetro Mössbauer, con cobalto-57 en su interior y construido en Alemania, para identificar minerales compuestos por hierro.

El conjunto de instrumentos incluía tres imanes aportados por Dinamarca, uno situado en la herramienta RAT, otro en la cubierta superior y otro en la parte frontal del rover, cuyo objetivo era estudiar las partículas magnéticas en suspensión. Aunque no era un instrumento propiamente dicho, cada rover disponía un reloj solar originalmente diseñado para la misión Mars Surveyor 2001 con el nombre de Marte en decenas de idiomas y la leyenda ‘Dos mundos, un sol’. Los rovers llevaban además microchips con las firmas de miles de trabajadores del JPL y de la NASA, así como un DVD financiado por la empresa danesa Lego con los nombres de 4 millones de internautas.
El viaje a Marte
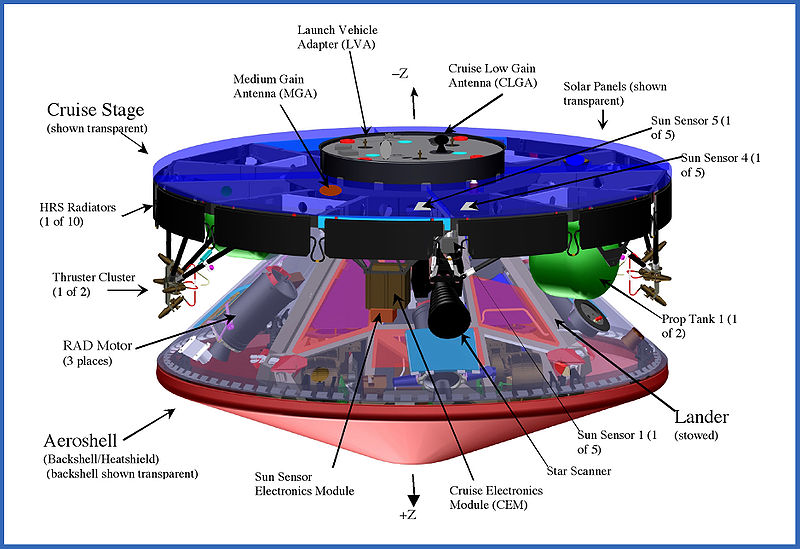
Cada rover viajaría a Marte dentro del escudo térmico y la estructura de aterrizaje tetraédrica de la Mars Pathfinder, formada por una base a la que estaría pegada el rover y tres ‘pétalos’ desplegables. La forma de la estructura era tal que la nave podía caer en cualquier posición y enderezarse usando los motores de apertura de los pétalos. Cada cara del tetraedro incorporaba seis airbags de 5 metros de diámetro para amortiguar la caída final que se inflarían a una presión de 6900 pascales. Los airbags estaban dotados de una doble membrana y estaba recubiertos por seis capas de fibra ultrarresistente para evitar posibles pinchazos, dos capas adicionales introducidas después de que los ingenieros observasen con espanto cómo los airbags originales de la Pathfinder se reventaron durante una de las pruebas. Añadir estas dos capas extras incrementó la masa total del vehículo en 24 kg.


Aunque la misión fue concebida para usar los mismos sistemas que la Mars Pathfinder, finalmente fue necesario modificar ciertos componentes. El paracaídas tuvo que ser agrandado un 40% para soportar la masa extra, una tarea que resultó ser tremendamente compleja. Durante las pruebas en túneles de viento el paracaídas se negó a inflarse correctamente y en una ocasión hasta llegó a desgarrarse, unos fallos que habrían condenado la misión en condiciones reales. El diseño final no estaría listo hasta ocho meses antes del despegue, por lo que el desarrollo del paracaídas estuvo muy cerca de dar al traste con toda la misión. La masa total al lanzamiento de cada nave sería de 1060 kg, incluyendo 183 kg de la etapa de crucero (con 52 kg de hidrazina) y 365 kg de los rovers y la estructura de aterrizaje.

Para evitar la contaminación de Marte con microorganismos terrestres, las dos naves fueron esterilizadas limpiando sus superficies con alcohol y calentando a 110º C de temperatura aquellos componentes que pudiesen tolerarlo. Como resultado, ninguna de las partes en contacto con la superficie tenía más de 300000 esporas bacterianas. Los componentes electrónicos no se pueden esterilizar sin dañarlos, por lo que estaban situados dentro de una caja hermética dotada de filtros que impedían el paso a los posibles microorganismos que pudiesen estar en su interior.

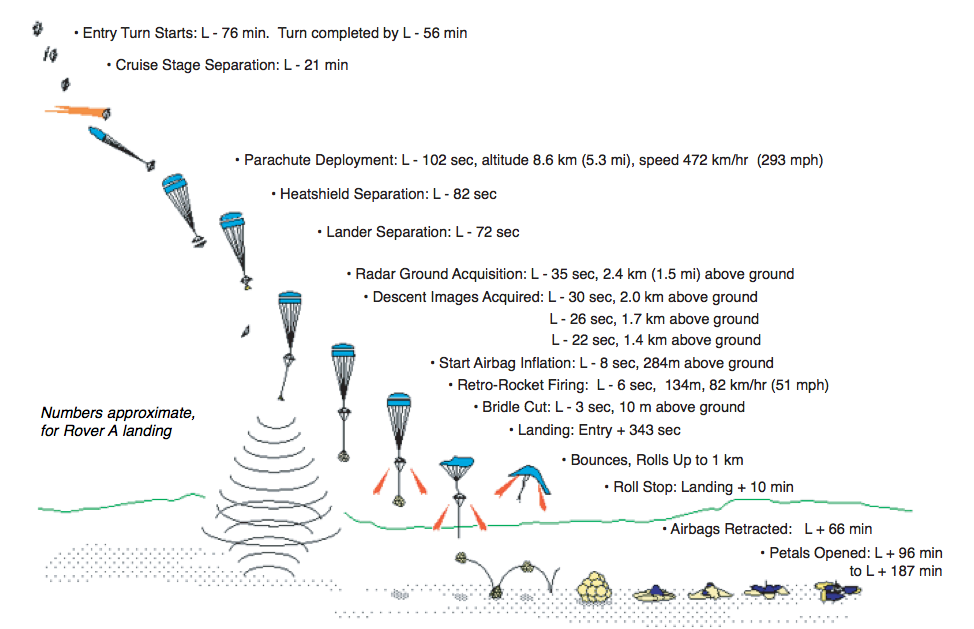
La secuencia de entrada atmosférica, descenso y aterrizaje, o EDL (Entry, Descent and Landing) en la jerga de la NASA, y más conocida como ‘los seis minutos de terror’ sería la fase más arriesgada de la misión tras el lanzamiento y constaría de las siguientes fases. La cápsula con el escudo térmico de 2,65 metros de diámetro se separaría de la etapa de crucero 21 minutos antes de alcanzar la atmósfera. Esta etapa circular sería la encargada de suministrar energía a la nave durante el vuelo al planeta rojo a través de un panel solar capaz de producir 600 vatios en la órbita terrestre (300 a la distancia de Marte). También era la encargada de llevar a cabo las maniobras orbitales necesarias, para lo cual usaría cuatro propulsores de 4,5 newton de empuje a base de hidrazina. Para estabilizar el conjunto, la nave giraría dos veces por minuto durante el trayecto hasta Marte.

La entrada atmosférica comienza a 170 kilómetros de altura y seis minutos antes del aterrizaje, mientras la nave viaja a 5,7 km/s. Gracias a la lección de la Mars Polar Lander, la sonda transmitiría telemetría durante el descenso. Así, si algo iba mal, la NASA podría saber qué habría pasado. Cuatro minutos antes de aterrizar, el escudo térmico, fabricado con el material ablativo SLA-561, experimentaría el calentamiento máximo. A una altura de 8,6 kilómetros se desplegaría el paracaídas principal, de 15 metros de diámetro, y veinte segundos más tarde se separaría el escudo térmico, que caería libremente a la superficie. 83 segundos antes del aterrizaje la estructura tetraédrica donde viajaban los rovers se descolgaría del escudo térmico trasero y el paracaídas usando una brida de material plástico de 20 metros de longitud, creando una configuración de doble péndulo un tanto inestable. A unos 2,4 kilómetros de altura el radar Doppler comenzaría a rastrear el suelo, aportando datos vitales sobre la altura y velocidad al ordenador de la nave, datos que serían complementados mediante la comparación de imágenes tomadas por una cámara de descenso. A 284 metros de altura los airbags se inflarían y dos segundos después un conjunto de tres cohetes de combustible sólido situados en el escudo térmico trasero entrarían en acción para frenar la velocidad de caída. Otros cohetes laterales se activarían si fuese necesario para neutralizar la velocidad horizontal de la sonda. Tres segundos tras el encendido de los cohetes, la velocidad de la nave se habría reducido a prácticamente cero y la estructura con los airbags se separaría a diez metros de altura del escudo y el paracaídas. La sonda caería libremente, impactando contra el suelo a una velocidad máxima de 90 km/h (si se superaba esta velocidad, los airbags reventarían) y botaría en varias ocasiones antes de detenerse, momento en el que se desinflarían los airbags. Un sistema de cuerdas retraería la tela de los mismos y la nave abriría sus pétalos, dejando expuesto al rover, que, una vez desplegadas las ruedas y el mástil con las cámaras, podría acceder a la superficie por cualquiera de las tres rampas de material Vectran situadas en la cara interior de los pétalos.
El difícil camino hasta el planeta rojo
Los dos rovers se habían denominado MER-1 y MER-2, así que lo lógico hubiera sido lanzar primero a MER-1. Sin embargo, el MER-1 fue sometido a un mayor número de pruebas que su compañero, así que se decidió que primero despegaría MER-2. Para evitar confusiones con el orden y los números, MER-2 fue rebautizado como MER-A y MER-1 pasó a ser MER-B.

Ahora había que decidir a qué lugar de Marte había que mandarlos. Al usar energía solar, los rovers no podrían sobrevivir el invierno de latitudes moderadas o elevadas -por encima de 15º norte o sur-, mientras que el sistema de aterrizaje sólo permitía acceder a las zonas más bajas del planeta (inferiores a -1,3 km de altura con respecto a la altitud media de Marte). Usando los datos de las sondas Mars Global Surveyor y Mars Odyssey, los científicos identificaron varias zonas de interés. En octubre de 2001 se seleccionaron cuatro lugares principales (Meridiani Planum, el cráter Gusev, Melas Chasma y Athabasca Vallis) y dos alternativos (Isidis Planitia y Eos Chasma). En febrero de 2003 la comunidad científica recomendó oficialmente el cráter Gusev para el rover MER-A y las planicies de Meridiani Planum para el MER-B, una decisión que sería aprobada oficialmente por la NASA en marzo, a pocos meses del lanzamiento.

Siguiendo la consigna de la NASA ‘sigue el agua’, los dos lugares presentaban pruebas inequívocas de la existencia de agua líquida en el pasado. En el caso del cráter Gusev, el canal Ma’adim Vallis desemboca en el mismo cráter, por lo que todo hacía pensar que Gusev había sido un antiguo lago marciano, ¿y qué mejor sitio para explorar el pasado húmedo de Marte que el fondo de un lago? Por otro lado, la Mars Global Surveyor había detectado pruebas de la existencia de mineral hematita (trióxido de dihierro) en Meridiani Planum, un mineral que requiere la presencia de agua líquida para su formación. Otros factores que se tuvieron en cuenta para seleccionar el lugar fue que el relieve no fuese demasiado abrupto y que incluyese las elipses de aterrizaje por completo. Las dos zonas de aterrizaje se encontraban en hemisferios distintos del planeta rojo, evitando en todo lo posible un solapamiento de las operaciones (los rovers sólo podían trabajar por la noche de forma muy limitada).

Una vez seleccionada la zona de aterrizaje se pudo determinar la ventana de lanzamiento. Para el MER-A la ventana iría del 30 de mayo al 16 de junio de 2003, lo que permitiría llegar a Marte el 4 de enero de 2004 usando un cohete Delta II 7925. La ventana de MER-B se extendería hasta el 15 de julio, pero sería menos favorable y por eso la NASA emplearía un cohete Delta II 7925H, más potente.
El 8 de junio de 2003 la NASA anunció el resultado del concurso para bautizar a los MER en el que habían participado más de diez mil escolares y que había contado con la colaboración de la Planetary Society y la empresa Lego. La ganadora fue Sofi Collis, una niña de 9 años de ascendencia rusa que había sido adoptada por una familia de Arizona. Sofi llamó Spirit a MER-A y Opportunity a MER-B. De acuerdo con la propia Sofi, “vivía en un orfanato. Era oscuro y solitario. Por las noches, miraba al cielo reluciente y me sentía mejor. Soñaba con poder viajar hasta allá. En América, puedo hacer realidad todos mis sueños. Gracias por el ‘espíritu’ y la ‘oportunidad’”.

Lanzamiento
El lanzamiento de Spirit (MER-A/MER-2) se retrasó hasta el 8 de junio por culpa de varios problemas menores, pero el mal tiempo obligó a posponerlo hasta el 10 de junio. El cohete Delta II se portó como se esperaba y Spirit despegó sin problemas ese mismo día desde la rampa SLC-17B de Cabo Cañaveral. Media hora más tarde ya se encontraba en ruta hacia Marte. Diez días después la nave realizó una corrección orbital para situarse en la trayectoria correcta, ya que había sido situada en una ruta que no cruzaba el planeta rojo para evitar que la tercera etapa del Delta II, que no había sido esterilizada, alcanzase Marte.

Ahora le tocaba el turno a Opportunity (MER-B/MER-1), que se resistió un poco más a abandonar la gravedad terrestre. El lanzamiento fue primero retrasado al 28 de junio por culpa del desprendimiento de aislante de corcho en la primera etapa del Delta II. Ese día, el despegue tuvo que ser aplazado por culpa de los vientos a gran altura y por la intrusión de un barco en perímetro del centro espacial. El aislante de corcho de la primera etapa volvió a desprenderse y el despegue tuvo que retrasarse hasta el 5 de julio, pero entonces se descubrió que una de las baterías del sistema de autodestrucción estaba descargada. El fin de la ventana de lanzamiento se aproximaba peligrosamente y la NASA se apresuró a asegurar a una inquieta opinión pública -y a un histérico equipo de la misión- que el lanzamiento podría tener lugar hasta el 18 de julio si fuera necesario, sacrificando eso sí las reservas de combustible del lanzador. Pero no hizo falta llegar a esos extremos. El 7 de julio Opportunity despegó hacia Marte sin problemas, aunque al segundo intento.


El viaje a Marte transcurrió sin incidentes dignos de mención. Spirit realizó un total de seis maniobras orbitales para llegar a su destino, mientras que Opportunity solamente requirió cinco. Las maniobras tuvieron como objetivo principal reducir el tamaño de la elipse de aterrizaje.


Llegada a Marte
Marte, 4 de enero de 2004. Un bólido incandescente atraviesa la atmósfera marciana. El escudo térmico de Spirit se calienta hasta los 1600º C mientras la nave sufre una aplastante aceleración de 6 g. La compleja secuencia de descenso, los famosos seis minutos de terror, tiene lugar de forma impecable, aunque el paracaídas se abre unos segundos más tarde al ser la atmósfera menos densa de lo esperado. La nave rodeada por 24 airbags rebota hasta 28 veces antes de pararse en una planicie con 2º de inclinación a las 04:35 UTC, aunque en el cráter Gusev eran las 14:00 horas. El análisis posterior del descenso reveló que, de no haberse encendido uno de los cohetes laterales, la sonda podría haber chocado contra una de las paredes laterales de un cráter, posteriormente bautizado Bonneville, situado 300 metros noreste, quizás reventando los airbags en el proceso y, con ellos, al pequeño robot que viajaba en su interior.
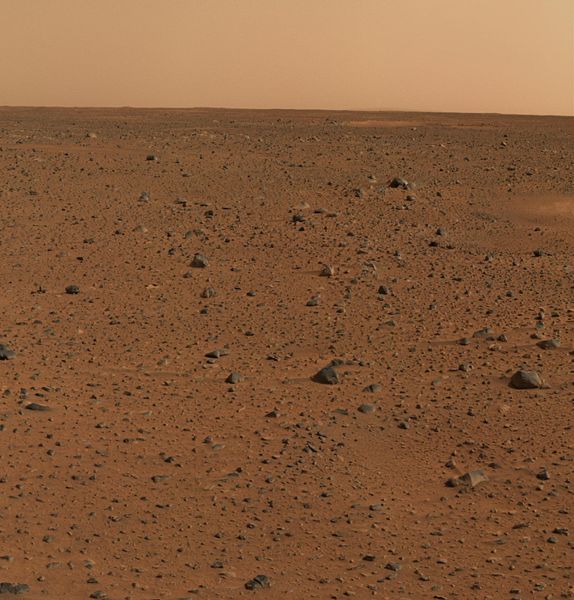
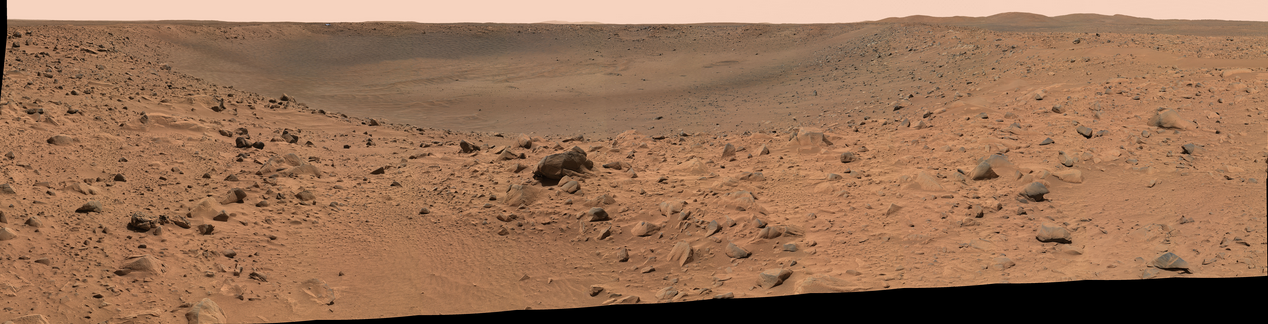
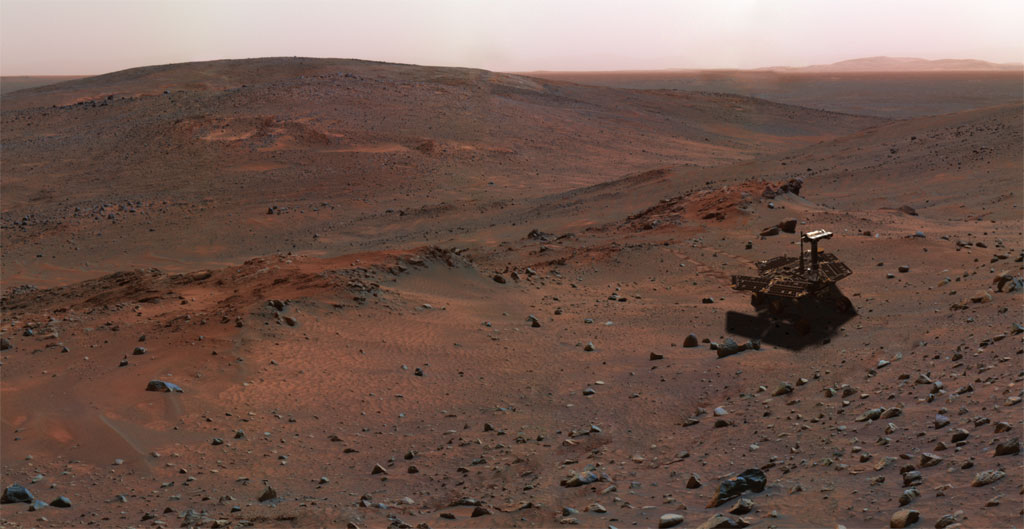
Mientras los gritos de júbilo llenaban la sala del control de la misión, los airbags se desinflaron y la nave quedó con la base hacia abajo, por lo que no sería necesario que los pétalos enderezasen la estructura. Toda la operación de retracción de airbags y apertura de los pétalos duró una hora y media y sólo al finalizar el equipo de la misión respiró tranquilo. ¡Estábamos en Marte! Spirit se convertía así en la cuarta nave espacial que había logrado aterrizar con éxito en el planeta rojo y que había sobrevivido para contarlo. Inmediatamente después llegaron las primeras imágenes en blanco y negro procedentes de las Navcams y Hazcams. El rover estaba sano y salvo en la superficie de Marte, una superficie plana recubierta por rocas de todo tipo, aunque más pequeñas y menos polvorientas de lo previsto. En definitiva, una estampa típica de Marte.

El lugar del aterrizaje sería posteriormente bautizado como Columbia Memorial Station en honor de la tripulación de la misión STS-107 Columbia, fallecidos en febrero de 2003. Las colinas centrales del cráter Gusev, de unos cien metros de altura, también fueron llamadas ‘colinas Columbia’ y cada pico recibió el nombre de uno de los siste miembros de la tripulación. Spirit desplegó sus ruedas durante los soles 6 y 7, pero se decidió hacer bajar al robot por otra rampa, ya que se observó que los airbags del pétalo frontal no se habían retraído totalmente. Durante el sol 10 el rover giró sobre sí mismo y en el sol 11 alcanzó la superficie, quedando a 80 cm de la rampa lateral. Durante los días siguientes Spirit probó uno a uno todos sus instrumentos.

El 21 de enero (sol 17) Spirit dio un susto de muerte a todo el mundo cuando entró en modo seguro por culpa de un fallo de la memoria flash. Durante tres días la misión estuvo al borde del abismo. El ordenador del rover se estaba reseteando continuamente cada cuarto de hora, incluso por las noches, agotando en el proceso las baterías. De seguir así, la misión podía darse por perdida. Por suerte, el control de la misión determinó que no se trataba de un fallo catastrófico y logró convencer al ordenador para que se activase sin usar la memoria flash. Después de actualizar el software el 6 de febrero, Spirit reanudó las operaciones científicas como si nada hubiese pasado. Ese mismo día se estrenó el taladro RAT sobre la roca Adirondack. Era la primera vez que se perforaba una roca en otro planeta.

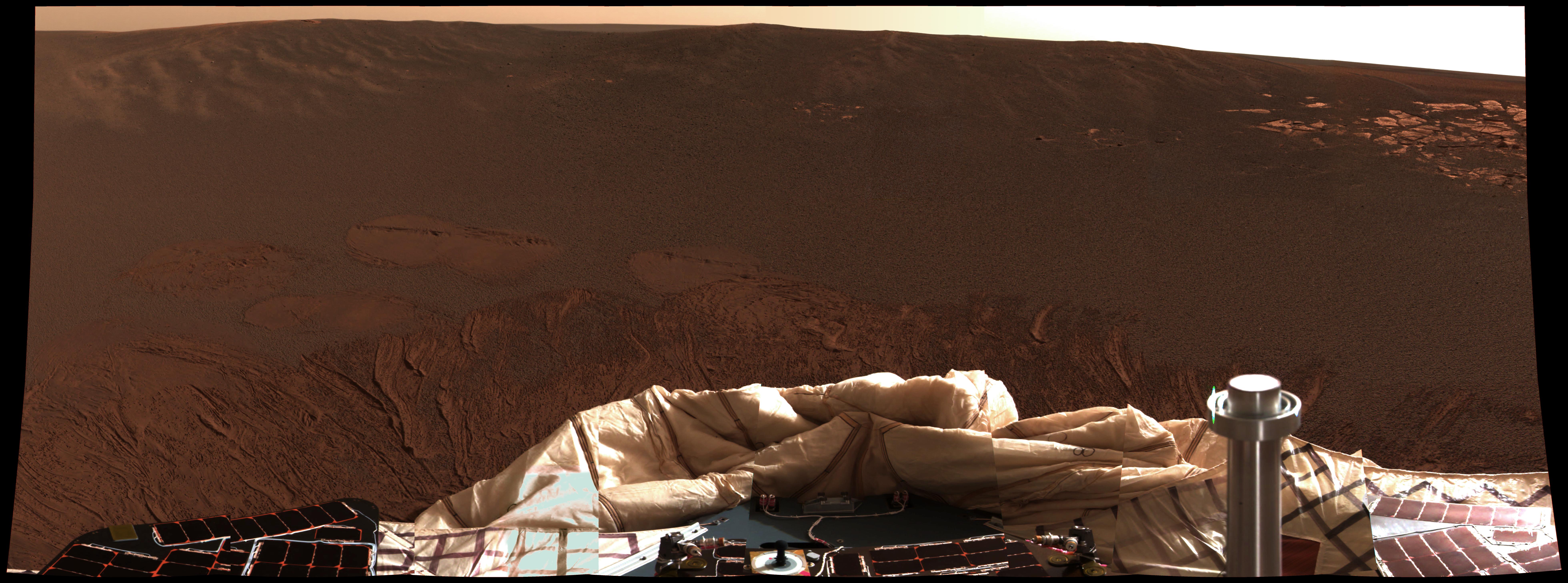
El 25 de enero de 2004 era la fecha prevista para la llegada de Opportunity a Marte. Mientras su hermano gemelo se recuperaba del fallo del ordenador principal, la sonda atravesó con éxito la atmósfera marciana convertida en un meteoro artificial, alcanzando una aceleración máxima de 6,3 g, ligeramente superior a la de Spirit. El paracaídas de Opportunity también se abrió más tarde de lo previsto, a 7,5 kilómetros de altura. Por entonces los modelos atmosféricos de Marte no estaban muy afinados. En esta ocasión los cohetes laterales no fueron necesarios. Opportunity rebotó 26 veces sobre la llanura de Meridiani protegido por sus airbags antes de detenerse dentro de un pequeño cráter de 22 metros de diámetro y 3 metros de profundidad, conocido posteriormente como cráter Eagle en honor del módulo lunar del Apolo 11. En esta ocasión la sonda se detuvo sobre uno de los pétalos laterales, por lo que tuvo que enderezarse antes de dejar el rover al descubierto. La NASA había conseguido poner una segunda nave en la superficie de Marte en menos de dos meses. Aunque los objetivos científicos distaban mucho de haberse alcanzado, desde el punto de vista político y mediático la misión MER ya era un éxito.

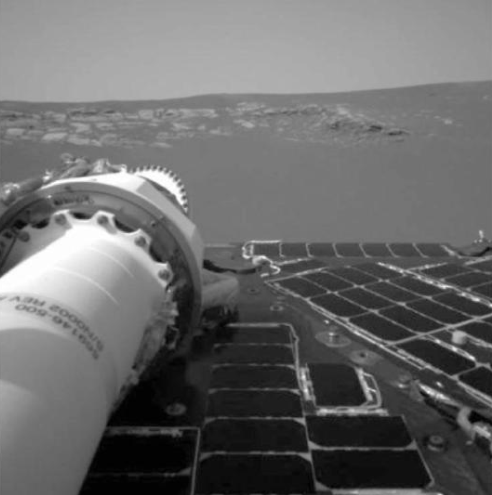
El lugar de aterrizaje fue bautizado como Challenger Memorial Station. Las primeras imágenes transmitidas por el rover causaron extrañeza. Sin saber que el rover había aterrizado dentro de un cráter, los científicos tardaron un tiempo en comprender el raro paisaje que rodeaba a Opportunity, completamente desprovisto de rocas o guijarros, era totalmente distinto a lo que habían visto las otras sondas marcianas. Inmediatamente les llamó la atención un saliente rocoso dividido en varios estratos. Un verdadero tesoro geológico al alcance de la mano, o mejor dicho, del brazo robot.
A diferencia de Spirit, Opportunity pudo descender por la rampa frontal, cosa que hizo diligentemente siete días tras el aterrizaje (sol 7). Dos días más tarde desplegó su brazo robot y se prestó a estudiar unas misteriosas esférulas de 1 cm de diámetro aproximadamente que cubrían el fondo del cráter. Las esférulas, luego apodadas como arándanos (blueberries), eran realmente concreciones con alto contenido de hematita, justamente el mineral que había traído al rover hasta Meridiani. Por entonces nadie sabía que los arándanos serían una de las características más comunes de Meridiani Planum y de otras zonas de Marte. El planeta rojo volvía a sorprender a los investigadores. Al acercarse al borde del cráter, Opportunity pudo divisar a lo lejos su paracaídas y el borde de otro cráter más grande, el Endurance.
Opportunity comenzó a estudiar el saliente rocoso a partir del sol 15, comenzando por la roca Stone Mountain. El APXS detectó la presencia de cloro, bromo y azufre, elementos relacionados con minerales formados en la presencia de agua. El 19 de febrero analizó el saliente El Capitán, donde se usó el RAT de Opportunity por vez primera. Tras estudiar los diversos salientes del cráter Eagle, el equipo de la misión llegó a la conclusión de que se trataba de rocas formadas por sales que se habían formado en agua líquida, todo un bombazo informativo que sacudió los medios y que catapultó a Opportunity al estrellato. Posteriormente se determinaría que el agua que cubrió esa zona de Meridiani Planum hace miles de millones de años tuvo que poseer una elevada acidez, pero no importaba. La NASA había enviado los MER a Marte para encontrar pruebas directas de la existencia de agua líquida. Y Opportunity las había encontrado nada más aterrizar, un auténtico golpe de suerte.

El 4 de marzo (sol 39) Opportunity observó un tránsito de Deimos por delante del Sol y, seis días después, otro de Fobos. Durante el transcurso de su misión los MER observarían varias veces los tránsitos de las dos pequeñas lunas marcianas. Los rovers se habían convertido en auténticos astrónomos marcianos. El objetivo de estas imágenes no era solamente romántico, ya que observar los tránsitos de las lunas marcianas permitía refinar las efemérides orbitales de estos satélites. Las observaciones del disco solar tenían como objetivo analizar la opacidad de la atmósfera marciana.
Al mismo tiempo que observaba los cielos, usó sus ruedas delanteras para cavar pequeñas zanjas y erosionar las rocas de los salientes rocosos del cráter Eagle. Durante el sol 56 Opportunity intentó salir del cráter, pero el fino regolito superficial y una pendiente de 17º lo impidieron. Tras seguir otro camino alternativo, Opportunity escapó de su prisión al día siguiente (22 de marzo). Desde su nueva atalaya realizó un panorama a color apodado el Rey León. Casi dos meses tras el aterrizaje, Oppy pudo contemplar en todo su esplendor la enorme extensión de Meridiani Planum, sin duda el paisaje marciano más extraño jamás visto por ojos humanos.

Los robots que no querían morir
Mientras Opportunity copaba los titulares, el control de la misión tenía que decidir cuál sería el siguiente objetivo de Spirit. En principio se pensó moverlo hasta una depresión plana cercana llamada Sleepy Hollow, pero finalmente se decidió que viajaría hasta el cercano cráter Bonneville, de 200 metros de diámetro, y, a muy largo plazo, hasta las colinas Columbia, situadas a unos tres kilómetros de distancia hacia el sur. Nadie pensaba por entonces que llegaría tan lejos. Es más, pocos eran los que creían que llegaría hasta Bonneville. En el sol 63 Spirit realizó varias observaciones astronómicas nocturnas, incluyendo la toma de fotografías de varias constelaciones, y el 8 de marzo el rover superó los 300 metros recorridos, uno de los hitos de la misión.

El 11 de marzo (sol 65), Spirit llegó al borde del cráter Bonneville, desde donde pudo divisar los restos del escudo térmico en una de las paredes. El cráter estaba cubierto por rocas volcánicas, al igual que la llanura donde había aterrizado. El equipo de la misión decidió que no valía la pena bajar al fondo del cráter. Unas rocas de color blanco dispersas por la llanura de Gusev llamaron la atención de los científicos. Podría tratarse de las ansiadas rocas sedimentarias que estaban buscando. No obstante, cuando Spirit analizó una roca de este tipo llamada Mazatzal que se hallaba en el borde del cráter se pudo comprobar que era una simple roca basáltica cubierta de polvo, aunque ciertamente mostraba evidencias de haber sufrido una exposición al agua líquida o al hielo en el pasado.
El equipo de la misión no lo podía admitir públicamente, pero el cráter Gusev había resultado ser una sonora decepción. En vez del lecho de un antiguo lago marciano repleto de rocas sedimentarias, Spirit sólo se había encontrado con rocas volcánicas. Evidentemente, la lava había fluido hacia Gusev en algún momento del pasado, cubriendo todo el fondo del cráter. Mientras Opportunity había logrado encontrar un objetivo geológicamente interesante a la primera, Spirit estaba condenado a vagar por Gusev analizando roca volcánica tras roca volcánica, una perspectiva bastante aburrida cuanto menos. Quizás las lejanas colinas Columbia, que sobresalían por encima de la planicie, estaban libres de materiales volcánicos, quizás. En el sol 87 Spirit puso rumbo a las colinas Columbia y el 5 de abril superó los 90 días de funcionamiento sobre la superficie marciana, superando así todas las expectativas iniciales y cumpliendo con todos los objetivos de la misión.
Por su parte, Opportunity recorrería ahora unos 700 metros para llegar al cráter Endurance, de 150 metros de diámetro, más que nada porque era la única característica del terreno medianamente llamativa en los alrededores. En el camino fue analizando varias rocas y zonas del suelo más o menos destacables. Durante los soles 64 y 69, Opportunity estudió la roca Bounce, que resultó ser originaria de algún cráter de impacto marciano. Bounce presentaba la misma composición que los meteoritos marcianos encontrados en la Tierra, lo que reforzó la hipótesis de un origen marciano para estas rocas.
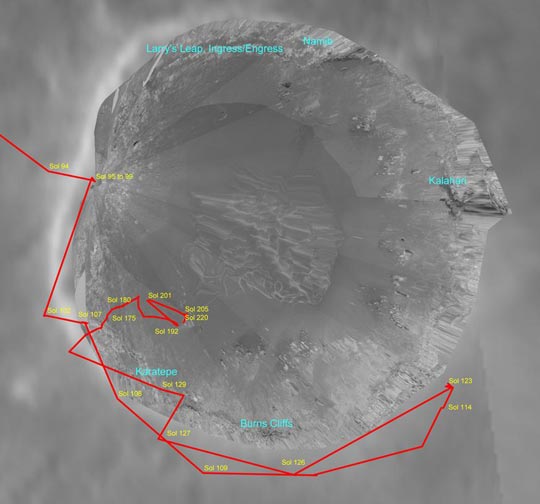
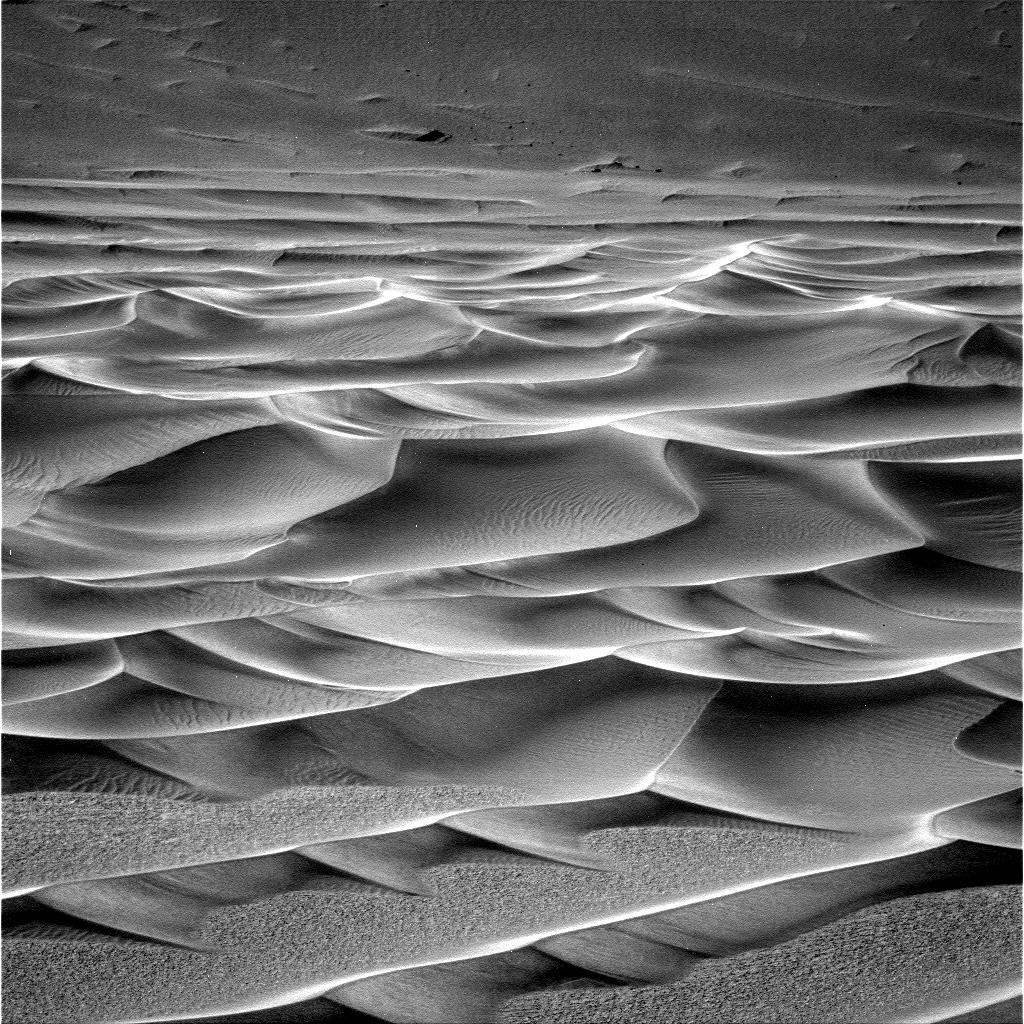
El 25 de abril (sol 90) Opportunity superó los tres meses en Marte, por lo que la misión fue declarada un éxito rotundo de forma oficial. El 30 de abril el rover llegó al fin al borde de Endurance. La pared del cráter estaba repleta de capas y estratos que volvieron locos a los científicos, mientras que el fondo lo ocupaban unas bellas dunas de fino polvo oscuro. Opportunity se dedicó a bordear la mitad el cráter, deteniéndose para estudiar las rocas y salientes más llamativos. El 7 de junio Opportunity entró en el cráter, una decisión muy arriesgada por culpa de las elevadas pendientes de su interior. Pero el equipo científico pensaba que el riesgo merecía la pena, incluso si el rover se quedaba atrapado en el interior. Dentro de Endurance Opportunity estudió la zona bajo los salientes Karatepe y Burns Cliff y descubrió más sulfatos y rocas formadas por el mineral jarosita.

Finalizada la misión primaria de 90 soles, la NASA autorizó una extensión de la misión para ambos robots, la primera de muchas. El equipo de la misión dejó de trabajar según el horario marciano y comenzó a dirigir los rovers de forma más relajada siguiendo el horario terrestre. El 8 de abril se actualizó el software de Spirit y el 11 de abril el de Opportunity con una nueva versión que gestionaba mejor el consumo energético de la sonda, una medida muy necesaria para mitigar los crecientes efectos negativos de la presencia de polvo sobre los paneles solares. Precisamente, una de las sorpresas de la misión vino de la mano de los curiosos torbellinos marcianos (dust devils) que limpiaron de polvo los paneles de los rovers en varias ocasiones, un fenómeno que sin duda contribuyó a prolongar la vida útil de los robots.

Durante el camino a las Colinas Columbia, Spirit analizó todo tipo de rocas y cavó varias zanjas con sus ruedas. La mayor distancia recorrida en un sólo día fue de 123,7 metros. A medida que se acercaba a las colinas, el rover comenzó a detectar un aumento de la presencia de azufre, cloro y bromo en las zanjas, lo que apuntaba a cierta modificación de los minerales por la presencia de agua. Después de diez semanas de viaje, Spirit alcanzó la base de las Colinas Columbia en sol 159 y se dedicó a estudiar la región Hank’s Hollow, donde, por sorpresa, se encontraron restos de hematita en la roca Pot of Gold. Por fin Spirit había encontrado pruebas, aunque muy indirectas, de la presencia de agua en el cráter Gusev.

Por entonces los rovers comenzaron a presentar sus primeros achaques. Un calefactor del brazo robot de Opportunity comenzó a gastar más energía de la esperada y fue necesario apagar todos los instrumentos durante la noche, disminuyendo significativamente el retorno científico. Este nuevo modo de funcionamiento se denominó Sueño Profundo (Deep Sleep) y permitió que Opportunity ahorrase mucha energía, aunque siempre cabía la posibilidad de que no despertase del sueño. Por su parte, la rueda frontal derecha de Spirit comenzó a experimentar una fricción excesiva y corría el riesgo de bloquearse por completo. A partir de sol 188 Spirit comenzó a moverse hacia ‘atrás’ para reducir los efectos negativos de la díscola rueda. Para sobrevivir a su primer invierno marciano, Spirit tenía que hibernar, para lo cual se le dotó de un modo de funcionamiento similar al Deep Sleep de Opportunity. Spirit, situado a -15º de latitud sur, siempre lo tuvo complicado para sobrevivir a los crudos inviernos del planeta rojo, a diferencia de Oppy, que se hallaba cerca del ecuador.

Entre los soles 192 y 199 Spirit estudió la roca Clovis, donde se detectó la presencia de mineral goethita, otra sustancia formada en presencia de agua líquida. El ascenso hasta la cima de las colinas Columbia fue difícil y arriesgado. Spirit patinó en varias ocasiones, llegando a deslizarse varios metros cuesta abajo. La rueda trasera izquierda se atascó en una roca y el control de la misión tardó varios días en liberar al intrépido robot. Spirit llegó a superar los 30º de inclinación al subir por una pendiente y en otra ocasión sufrió un pequeño cortocircuito. En febrero de 2005, tras superar con éxito su primer invierno marciano, Spirit llegó a una zona llana apodada el Mirador de Larry (Larry’s Lookout) que se encontraba en el camino hacia la cima de la colina Husband, la más alta de todas las colinas Columbia. En el sol 388 el equipo de la misión se dio cuenta de que las zanjas excavadas por las ruedas de Spirit dejaban al descubierto un material de color blanco. Tras analizar en el sol 400 la zanja Paso Robles se pudo comprobar que el material contenía una mayor proporción de sales sulfatadas que las encontradas por Opportunity en Meridiani Planum. Posteriormente se confirmó la presencia de agua dentro de dichas sales. Spirit también encontró piedras ricas en fosfatos, como las rocas Wishstone y Watchtower.

Spirit tomaría la que sería una de sus imágenes más memorables el 19 de mayo de 2005 (sol 489), una bella y azulada puesta de Sol marciana. Debido a la tenue atmósfera de Marte y a la presencia continua de polvo en suspensión, los amaneceres y ocasos marcianos no son ocres como en la Tierra, sino azules. Una verdadera puesta de Sol alienígena para el disfrute de los seres humanos.

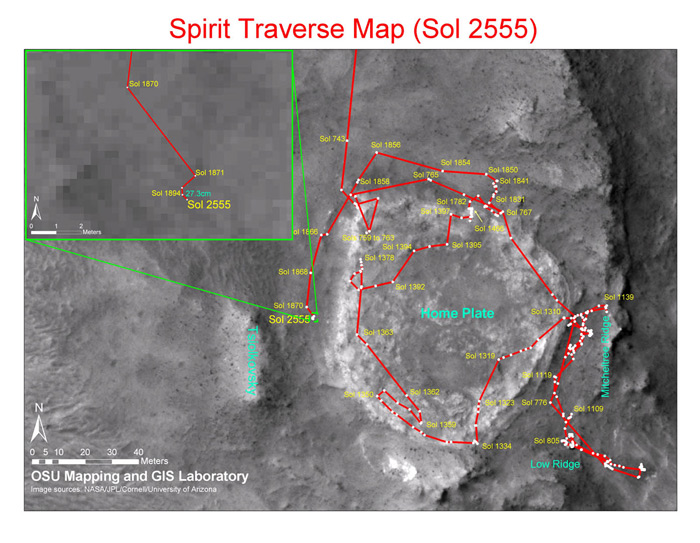
El 29 de septiembre de 2005 (sol 618) Spirit alcanzó la cima de la Colina Columbia, de 106 metros de altura, la primera vez que un robot subía una montaña en otro mundo. Para entonces la distancia recorrida por el rover alcanzaba los 4971 metros. Antes había pasado dos semanas estudiando la extraña roca Independence, que presentaba numerosos estratos, y varios salientes rocosos. Los análisis de la roca Comanche demostrarían que estaba formada por carbonatos, lo que se consideró como un auténtico éxito científico de la misión. Por fin Spirit comenzaba a descubrir los efectos del agua en el pasado de Marte. A finales de 2005 Spirit cruzó el llamativo campo de dunas El Dorado, formado por partículas volcánicas. Desde la cima de la Colina Columbia, Spirit observó una formación muy curiosa de forma circular que atrajo la atención de los científicos. Apodada Home Plate, parecía ser una estructura de roca muy antigua expuesta por la acción del viento. Spirit la alcanzaría en febrero de 2006 (sol 744) y en sus cercanías descubrió dos meteoritos más, denominados Zhang Shan y Allan Hills. El 13 de marzo de 2006 (sol 779) la rueda derecha delantera de Spirit se bloqueó definitivamente. Spirit ya no abandonaría esta región y hasta el final de su misión se dedicaría a explorar la zona próxima a Home Plate.
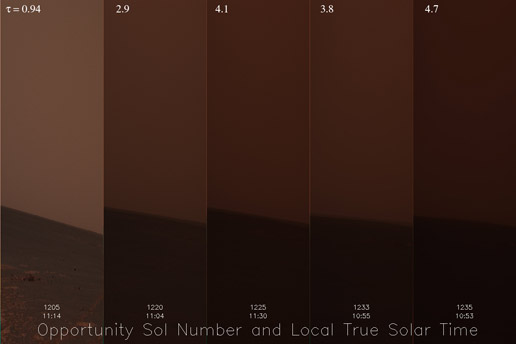
Spirit superó su segundo invierno marciano con dificultad. Los calefactores eléctricos se encendieron automáticamente en varias ocasiones a pesar de que el rover estaba en modo de ahorro de energía debido a que la temperatura de las baterías había disminuido por debajo de los -20º C. En marzo de 2007, y mientras estudiaba los alrededores de Home Plate, Spirit cavó una zanja -bautizada Gertrude Weise- de forma involuntaria al arrastrar su ya inútil rueda derecha delantera. El color blanco del material llamó la atención de los investigadores y poco después se comprobó que estaba compuesto por sílice pura, otro material que requiere agua para formarse. Por otro lado, se confirmó la existencia de titanio en la zona, lo que indicaba que la sílice de la zanja se tuvo que formar en agua con un pH neutro. El descubrimiento de sílice en las colinas Columbia se consideró otro de los grandes éxitos de la misión de Spirit, quizás el más importante. Entre junio y agosto de 2007 ambos rovers sufrieron los efectos de una tormenta de polvo global, por lo que no llevaron a cabo ninguna actividad científica significativa. Durante la tormenta, los paneles de Spirit solamente llegaron a producir 267 vatios-hora de energía.

Después de sobrevivir a su tercer invierno, el 29 de abril de 2009 Spirit quedó atrapado en una trampa de jarosita en la región de Troya cuando se dirigía a la pequeña planicie von Braun. La poca cohesión de los granos de este mineral impidió que el rover pudiera rodar normalmente. Para complicar las cosas, la rueda trasera derecha también dejó de funcionar. El equipo de Spirit llevó a cabo todo tipo de pruebas en tierra usando un modelo técnico de los MER para intentar liberar al robot. Pero todo fu inútil. Las borrosas imágenes de los bajos del rover tomadas por el microscopio del brazo robot parecían indicar que Spirit se había quedado atascado sobre una roca puntiaguda. A pesar de lanzar una campaña simbólica para ‘Liberar a Spirit’, el 26 de enero de 2010 la NASA renunció a intentar la liberación de Spirit y anunció que seguiría funcionando como plataforma científica estacionaria. Se trató de una decisión de la cúpula de la NASA, porque si la decisión hubiese dependido del equipo de Spirit, sin duda habrían optado por seguir intentando el rescate durante meses o años.

El 22 de marzo de 2010 Spirit mandó la que sería su última señal. El rover entró en estado de hibernación -Deep Sleep- de cara a su cuarto invierno marciano, pero nunca se despertó. Es posible que las baterías se agotasen totalmente durante el invierno o que su ordenador sufriese algún tipo de problema. Tanto da. Sin poder orientarse para ofrecer un mejor ángulo al Sol y así cargar mejor sus baterías, el control de la misión sabía que esto podía ocurrir en cualquier momento. La NASA intentó contactar con el rover con la esperanza de que la luz solar de la primavera marciana hubiera recargado las baterías, pero no hubo manera. El 25 de mayo de 2011 la agencia espacial dio por finalizada la misión de Spirit. Una vez más, la decisión vino del cuartel general de la agencia. En total, el pequeño robot había recorrido 7,73 kilómetros, doce veces más de lo inicialmente planeado, y tomado más de 128000 imágenes. De acuerdo con Steve Squyres, “en las colinas Columbia descubrimos pruebas sólidas de un Marte antiguo que una vez fue un lugar caliente, húmedo y violento, con explosiones volcánicas, actividad hidrotermal y géiseres de vapor”. Finalmente, Spirit pudo cumplir su objetivo y fue capaz de encontrar los rastros de agua que tanto había buscado infructuosamente al comienzo de su misión.


Opportunity, el superviviente infatigable
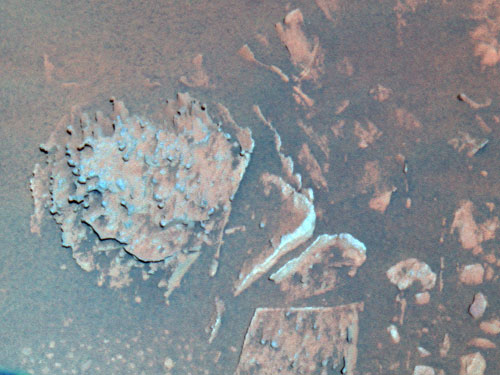
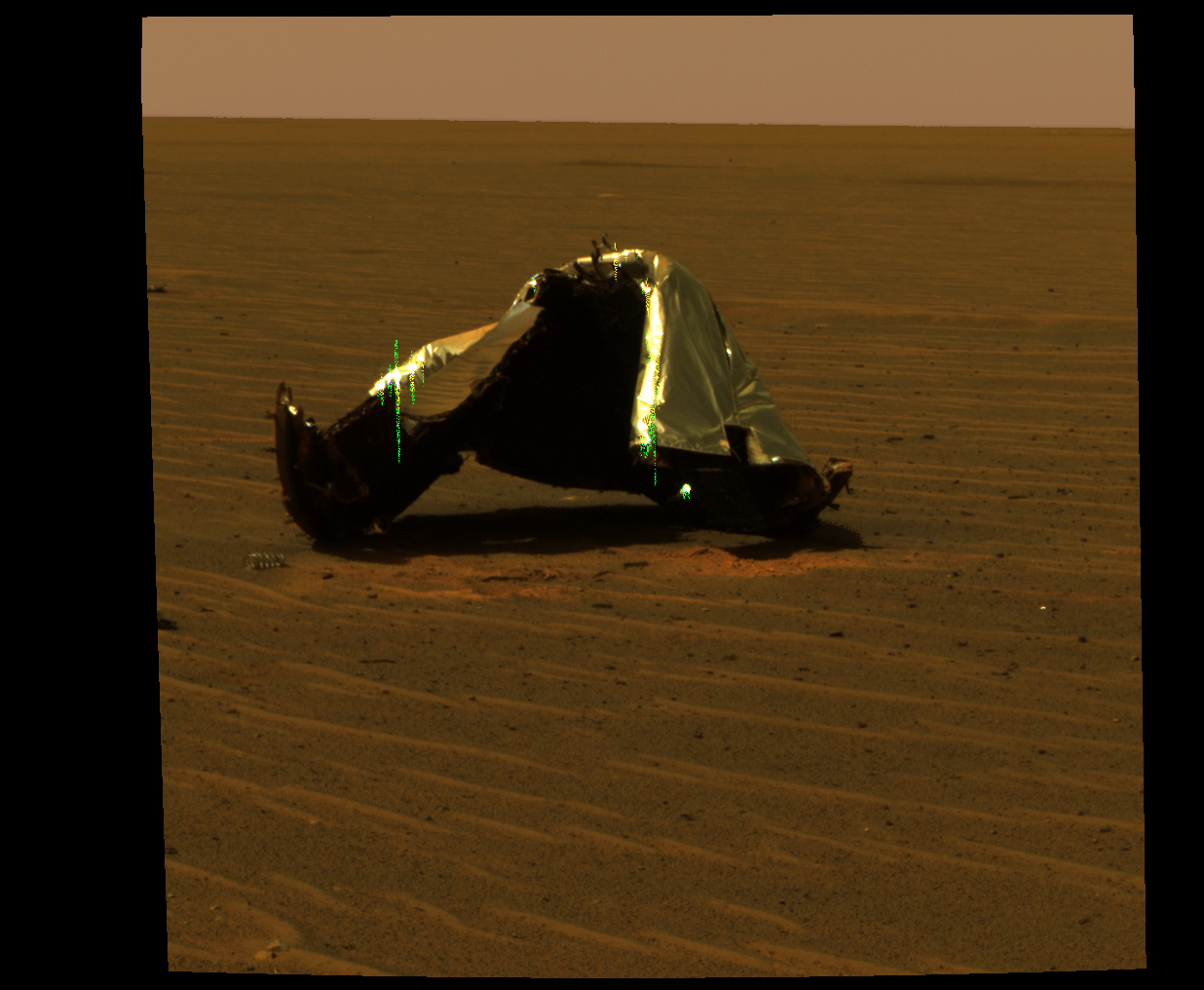
El 12 de diciembre de 2004 Opportunity salió del cráter Endurance tras pasar 181 soles en su interior y sobrevivir a su primer invierno marciano. Una vez fuera, en el sol 324 procedió a estudiar los restos del escudo térmico para analizar los efectos de la entrada atmosférica. Los ingenieros estaban deseosos de ver de primera mano el estado del escudo. Oppy usó su microscopio a principios de 2005 para ver los detalles del escudo y descubrió que algunas capas de plástico protector no se habían quemado en la entrada como se esperaba. Junto al escudo térmico había una sorpresa: un meteorito de hierro de 25 cm, llamado Heat Shield Rock, el primero descubierto fuera de la Tierra. El análisis de este y otros meteoritos reveló que Marte tuvo que poseer en el pasado una atmósfera más densa.

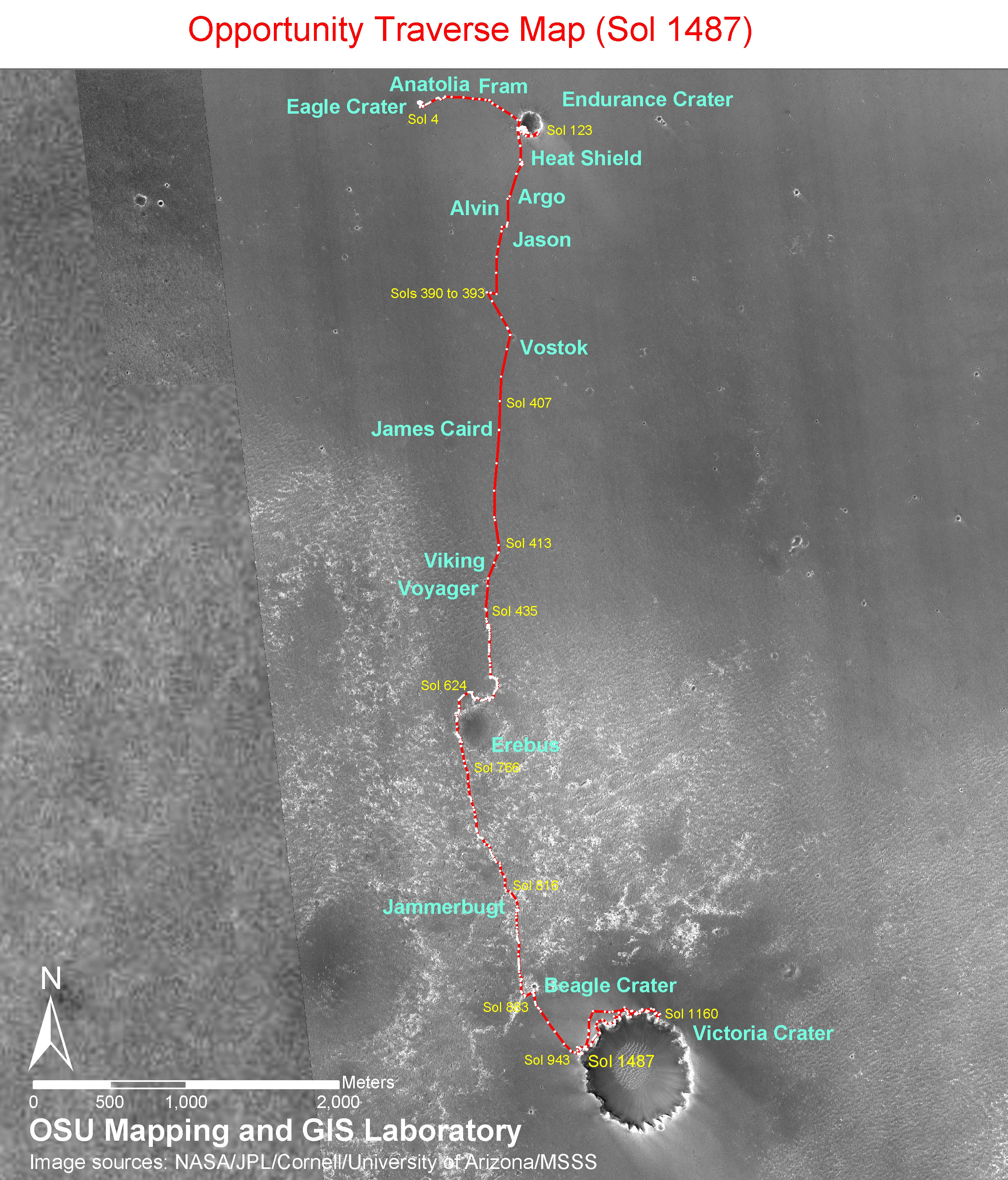
Opportunity se dirigió entonces hacia el sur, a un cráter aún más grande situado a siete kilómetros del lugar de aterrizaje llamado Victoria, una odisea que le llevaría más de un año. En el camino pasaría por varios cráteres, siendo el Erebus el más significativo. El camino no fue fácil. En el sol 433 la rueda derecha delantera se bloqueó, pero afortunadamente el equipo de la misión logró liberarla. En el sol 446 (26 de abril de 2005), Opportunity quedó totalmente atrapado en una pequeña y aparentemente inofensiva duna, convenientemente llamada Purgatory Dune. Tras titánicos esfuerzos por parte del control de la misión, Opportunity logró zafarse de su trampa 38 días más tarde. Oppy estuvo muy cerca de sufrir un triste fin.


Mientras estuvo cautivo en la Duna del Purgatorio, Opportunity aprovechó para protagonizar su propio momento ‘punto azul pálido’ y tomó una fotografía de nuestro planeta desde la superficie marciana, ahora convertido en un lucero de la tarde.

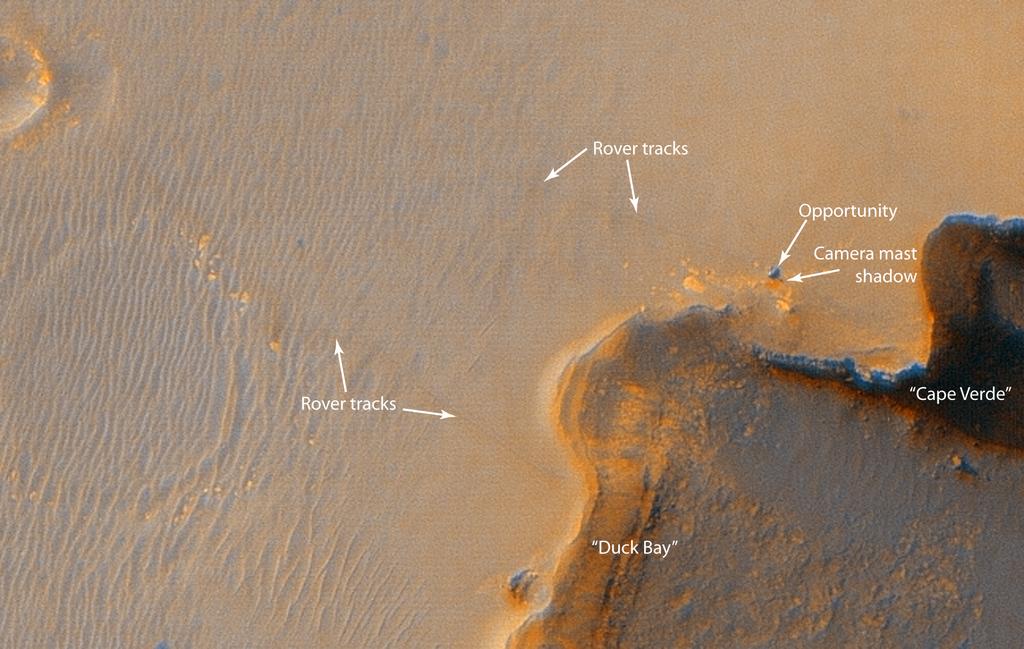
Victoria, llamado así por uno de los barcos de la expedición de Magallanes y Elcano, es un cráter de unos mil millones de años de antigüedad con estratos de 50 metros de altura, una verdadera máquina del tiempo para comprender el pasado de Marte. Después de un largo viaje, Opportunity llegó al cráter Victoria el 29 de septiembre de 2006 (sol 951), donde permanecería hasta agosto de de 2008. Una de las primeras tareas fue estudiar el espectacular promontorio Cabo Verde y luego se dedicó a rodear el cráter unos 90º antes de volver a la zona de Duck Bay y Cabo Verde. El 3 de octubre de 2006 la sonda Mars Reconnaissance Orbiter (MRO) fotografió desde la órbita a Opportunity en el borde de Victoria.
A mediados de 2007 Oppy tuvo que lidiar, como su hermano Spirit, con la tormenta de polvo global que cubrió Marte, pero salió vivo de la misma. Desgraciadamente, el espectrómetro infrarrojo Mini-TES no sobrevivió a la tormenta. El análisis de las rocas de Victoria reveló una enorme cantidad de azufre. El agua que había cubierto esa zona de Marte tuvo que poseer un contenido en sales tan elevado que ningún microorganismo terrestre podría vivir en ella de forma continuada. Por contra, la acidez del agua fue significativamente inferior a la que cubrió la zona de Meridiani que Opportunity había explorado más al norte. En abril de 2008 Oppy se enfrentó a otro desafío cuando el brazo robot se negó a plegarse. Tras intentarlo en repetidas ocasiones de forma infructuosa, el control de la misión logró idear una técnica para conducir con el brazo desplegado, una maniobra que requería tener mucho cuidado con la posición del centro de gravedad. En julio, mientras recorría el interior de Victoria, la rueda frontal derecha comenzó a fallar. Temiendo que el rover se quedase atrapado dentro del cráter, el control de la misión decidió no hacer subir a Oppy por las pendientes más elevadas.

Opportunity salió del cráter Victoria el 28 de agosto de 2008 y puso rumbo a un cráter aún mayor, el gigantesco Endeavour, de 22 kilómetros y situado a doce kilómetros del lugar del aterrizaje. Por el camino se encontró con dos meteoritos y visitó los cráteres Concepción (enero de 2010) y Santa María (julio de 2010). El 12 de noviembre de 2010 Oppy estudió una roca de 30 cm llamada Marquette Island que resultó ser similar a la roca Bounce, es decir, un trozo procedente de un antiguo impacto marciano. Increíblemente, Opportunity lo logró y alcanzó el Endeavour el 9 de agosto de 2011 al pasar por una zona llamada Spirit Mark, en honor de su rover gemelo. Pocos habían apostado por el pequeño robot, pero a estas alturas tampoco nadie se sorprendió. En diciembre de ese año Opportunity hizo uno de los grandes descubrimientos de su misión al analizar la roca Homestake, hecha de yeso puro, una prueba clara de que el agua líquida había fluido por grietas a través de las rocas superficiales marcianas.



En 2012 los paneles solares de Opportunity producían unos 250-350 vatios, una cifra que variaba dependiendo de los torbellinos que pasasen por encima del rover. El 2 de julio de 2012 Opportunity cumplió tres mil días en Marte, un aniversario que nadie hubiera pensado jamás que podría celebrar. Durante 2012 Oppy estudió la región de Cape York, en el borde del cráter Endeavour. Para entonces el espectrómetro Mössbauer y el instrumento Mini-TES habían dejado de funcionar y la desintegración del curio-244 del espectrómetro APXS implicaba que el instrumento debía permanecer días enteros pegado a una roca para obtener datos medianamente interesantes. En septiembre de 2012 Oppy descubrió un nuevo tipo de concreciones esféricas incrustadas en la roca Kirkwood, que se denominaron newberries. A diferencia de los arándanos encontrados al principio de la misión, las newberries no tienen hierro, por lo que su contenido de hematita debe se muy bajo. Todo un misterio aún por resolver. Y es que desentrañar el pasado de Marte es una tarea de geología inversa. En la Tierra los geólogos comenzaron con datos a nivel local y sólo posteriormente llegaron a construir un modelo global del planeta. En Marte ha sucedido todo lo contrario.

Oppy logró estudiar la roca Whitewater Lake en la zona de Matijevic Hill a finales de 2012, una piedra que presentaba claras evidencias de la presencia de esmectita, un verdadero bombazo para la misión que conmocionó a los científicos. ¿Por qué? Pues porque la esmectita es un mineral arcilloso que solamente se puede formar bajo la presencia de agua con un pH neutro. En concreto, el rover detectó nontronita y montmorillonita, dos minerales del grupo de las esmectitas. Opportunity confirmaba así los datos obtenidos por el espectrómetro CRISM de la sonda MRO y su misión entraba en una nueva fase. Ahora el robot vagaba por una zona que en el pasado había estado cubierta por agua no ácida, justo cuando se supone que Marte fue habitable, unos resultados por otro lado parecidos a los que el nuevo rover Curiosity estaba obteniendo al explorar el cráter Gale. En cierto modo, el viejo y pequeño rover le había robado protagonismo a su reluciente y enorme primo del cráter Gale al confirmar primero la existencia de arcillas en Marte. Sin embargo, Oppy no puede competir con la capacidad analítica de Curiosity y su conjunto de instrumentos, auténticos laboratorios portátiles capaces de analizar minerales concretos. Oppy sólo puede detectar elementos, no minerales, por lo que la identificación positiva de los mismos es mucho más compleja y discutible. E incluso esta capacidad se encuentra seriamente limitada al no disponer ya de dos de sus tres espectrómetros. Por eso el equipo de Curiosity se ha defendido argumentando que ellos han sido los primeros en confirmar la presencia de arcillas en Marte desde el suelo sin ningún género de dudas. ¿Quién dijo que la competencia no era sana?

En mayo de 2013 Oppy estudió la roca Esperance, probablemente formada por filosilicatos durante el antiguo Periodo Noeico (hace 3700-4000 millones de años), otro tipo de minerales arcillosos formados en agua con un pH neutro. El 16 de mayo abandonó la zona de Cape York para dirigirse a la región de Solander, que alcanzó en agosto. Por fin el intrépido aventurero lograba subirse a la cima de una colina marciana, emulando así a su hermano Spirit. Opportunity ha descubierto en los alrededores del cráter Endeavour una zona rica en yeso y minerales arcillosos, en definitiva, una zona antiquísima que en el pasado tuvo agua en abundancia y, para más inri, fue favorable a la vida microbiana tal y como la conocemos. Gracias a su tenacidad, los dos rovers han estudiado cuatro ambientes marcianos completamente distintos a lo largo de su misión: las planicies volcánicas del cráter Gusev, la llanura de Meridiani Planum donde una vez hubo agua líquida fuertemente ácida, la cima de las colinas Columbia con restos de actividad hidrotermal y la región del cráter Endeavour donde existieron masas de agua líquida con un pH neutro durante la Era Noeica. Cuatro paisajes de un Marte primigenio a cada cual más fascinante por el precio de dos misiones.
Mientras escribo estas líneas, Opportunity está a punto de cumplir una década sobre la superficie marciana. Ha recorrido unos 39 kilómetros, sobrevivido a más de 3460 noches marcianas, tomado más de 187000 imágenes y, lo más importante, ha convertido en rutinario lo que parecía imposible: moverse por la superficie de Marte. A pesar de tener una articulación con artritis, una rueda que funciona a duras penas, una memoria corrupta y un calefactor defectuoso que lo obliga a apagarse cada noche, el viejo robot resiste. Evidentemente, algún día -más pronto que tarde- dejará de funcionar. Seguramente una noche se dormirá para no despertar jamás, pero ya podemos decir que se trata de la sonda marciana más longeva de la historia.
Spirit y Opportunity han cumplido con todos los objetivos científicos y técnicos de su misión. Durante una década han sido los ojos y oídos de la humanidad en otro mundo. Millones de personas han seguido sus peripecias, se han emocionado con sus descubrimientos y, cuando tocaba, se han angustiado con sus problemas. Cuando ninguno de nosotros esté por estos lares, Spirit y Opportunity seguirán allá, en Marte, como recordatorio de la determinación de nuestra especie por explorar el Sistema Solar.


Este comentario ha sido eliminado por el autor.
ResponderBorrarEste comentario ha sido eliminado por el autor.
ResponderBorrarEste comentario ha sido eliminado por el autor.
ResponderBorrar