Proyecto HERRO: humanos y robots estudiando Marte
Un viaje tripulado a Marte es el objetivo definitivo de cualquier programa espacial que se precie. Pero, como siempre, un viaje tripulado a Marte no tendrá lugar hasta dentro de dos o tres décadas como mínimo. Independientemente de las declaraciones grandilocuentes de algunos medios y agencias espaciales, la cruda realidad es que actualmente no hay ningún plan serio para enviar seres humanos al planeta rojo. “Viajar a Marte es demasiado caro y complejo, mejor que los robots hagan el trabajo por nosotros”, dicen los partidarios de la exploración automática. “Los humanos son mucho más eficientes que cualquier sonda espacial”, argumentan los incondicionales de la exploración tripulada del espacio. Pero, ¿y si aunamos las ventajas de ambos tipo de exploración? Eso es precisamente lo que pretende el programa HERRO de la NASA.

HERRO (Human Exploration using Real-time Robotic Operations) nació en 2011 tras la cancelación del Proyecto Constelación de la NASA. Entonces quedó claro que la agencia espacial no dispondrá a medio y largo plazo de los medios para poner un hombre en la superficie de Marte incluso contando con un cohete gigante como el futuro SLS (Space Launch System). Y es que la parte difícil de un viaje a Marte no es llegar hasta allí, sino alcanzar su superficie. Dicho de otra manera, se trata de evitar los pozos gravitatorios planetarios y reducir así la Delta-V total de la misión. De esta manera, los únicos destinos posibles para misiones tripuladas son los asteroides cercanos (NEOs) o las órbitas de la Luna y Marte. Evidentemente, llegar tan lejos para no poner un pie en la superficie marciana parece un sinsentido. Y ahí es donde entran en juego los robots.
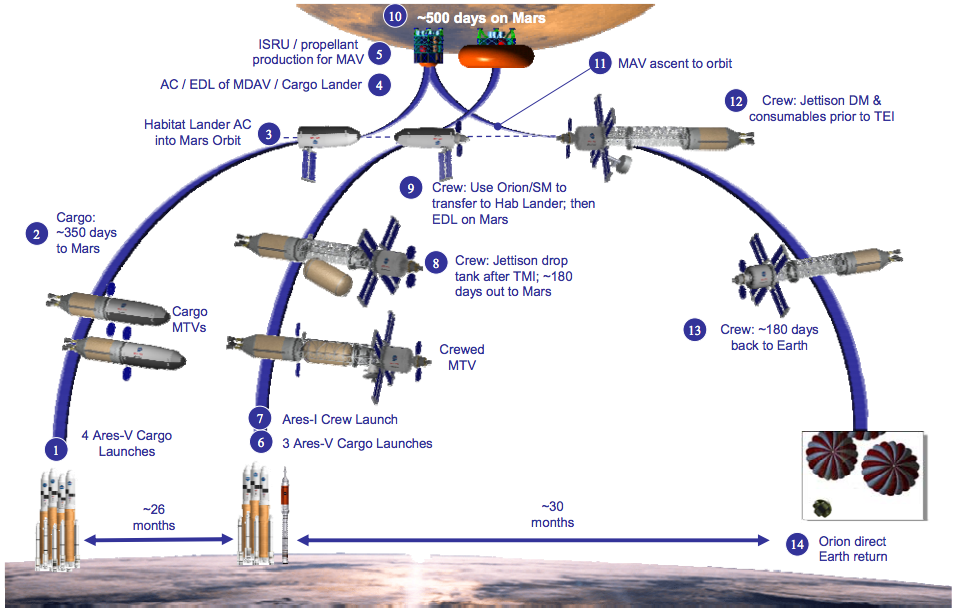
Una de las principales desventajas de las sondas automáticas es la complejidad de las operaciones debido al retraso en las comunicaciones con la Tierra que impiden un control en tiempo real de las misiones. Sin embargo, los astronautas en órbita marciana -o en Fobos o en Deimos- podrían controlar las sondas mediante telepresencia y explorar la superficie marciana en un tiempo récord. El último plan que la NASA ha concebido para poner un hombre en Marte es la DRA 5.0 (Design Reference Architecture 5.0), creado en 2008 en plena euforia del Proyecto Constelación. La arquitectura DRA 5.0 preveía el lanzamiento de hasta siete cohetes gigantes Ares V y un Ares I para lanzar dos naves de carga y una nave tripulada al planeta rojo. Las naves de carga llevarían los víveres y equipos necesarios para que una tripulación de seis personas sobreviviese durante 500 días en la superficie de Marte. Todas las naves usarían propulsión nuclear térmica (NTP) y aerocaptura para reducir la Delta-V total de la misión, así como técnicas ISRU (In-Situ Resource Utilization) con el fin de crear el combustible necesario para el regreso a partir de la atmósfera marciana.

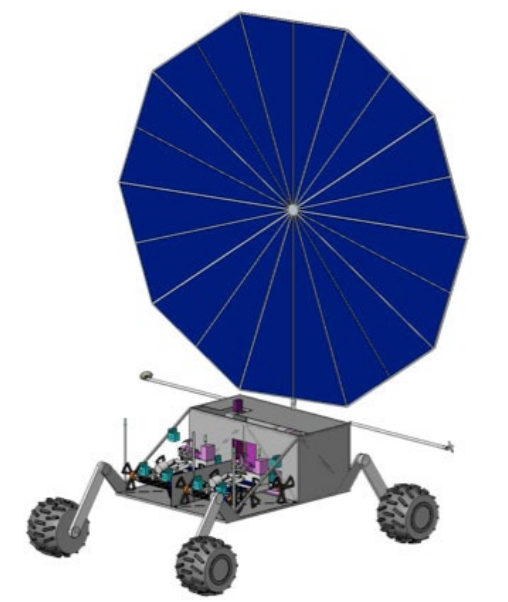
Acorde a los nuevos tiempos, HERRO es una especie de DRA 5.0 descafeinada. HERRO también requiere siete lanzamientos para completar una misión, pero sólo tres de ellos serían cohetes de gran tamaño como el SLS. Primero se mandarían a Marte tres sondas no tripuladas usando cohetes convencionales como el Atlas V o el Delta IV Heavy. Cada una de las sondas consistiría en un ‘vehículo nodriza’ o camión (truck) que a su vez transportaría dos pequeños rovers de exploración geológica apodados rockhounds. Las sondas usarían el mismo sistema de descenso y aterrizaje que Curiosity pero no llevarían RTGs con plutonio, sino paneles solares. Cada vehículo nodriza podría recorrer un mínimo de cien kilómetros durante su misión y se encargaría de desplegar y recoger losrockhounds en las zonas que la tripulación considerase interesantes.

Las tres sondas automáticas despegarían 26 meses antes de que la tripulación pusiese rumbo a Marte. La nave tripulada, parecida a la del DRA 5.0, requeriría tres lanzamientos del SLS para ser ensamblada en órbita terrestre y se denominaría CTCV (Crew Telerobotic Control Vehicle). Un lanzamiento pondría en órbita la etapa propulsora NTP y la estructura central, otro el tanque de combustible para la inserción en órbita marciana y un tercero el módulo hábitat de la misión para seis personas. Unas reservas de 14 toneladas de agua rodearían las áreas de dormitorio y trabajo de la tripulación y servirían como escudo antirradiación para proteger a la tripulación durante la misión. La masa total de la nave tripulada una vez ensamblada sería de unas 400 toneladas. Los astronautas alcanzarían la nave mediante dos naves Orión, una de las cuales formaría parte del vehículo tripulado. La cápsula de la Orión sería la empleada por la tripulación para regresar a la Tierra al finalizar la misión, que tendría una duración total de 900 días aproximadamente.

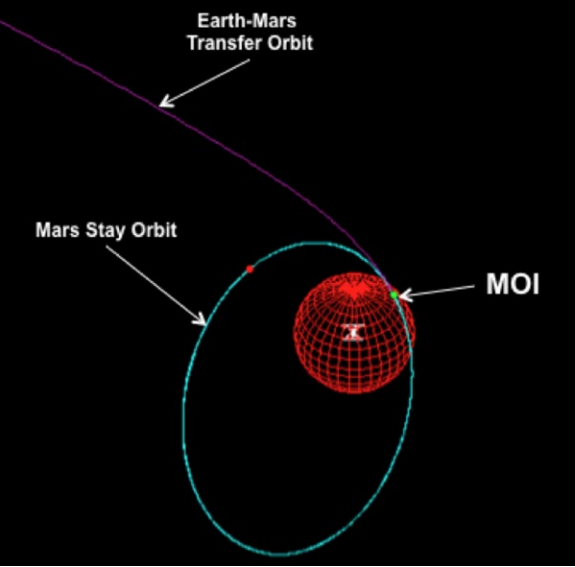
La nave pondría rumbo a Marte y una vez alcanzado su objetivo se situaría en una órbita excéntrica de tipo Mólniya con un periodo de doce horas y una inclinación de 116º. El hábitat CTCV comenzaría a girar 2,7 veces por minuto para proporcionar una gravedad artificial similar a la marciana y atenuar así los efectos perniciosos de la mcirogravedad sobre el organismo humano. Los seis astronautas pasarían 500 días en órbita marciana controlando mediante telepresencia los tres grupos de sondas automáticas antes de partir a la Tierra. Gracias a que se trata de una misión orbital y no de superficie, la nave tendría suficientes reservas de combustible para situarse en órbita terrestre o para alcanzar el punto de Lagrange L1 del sistema Tierra-Luna, lo que permitiría ser reutilizada una vez más para otra misión.

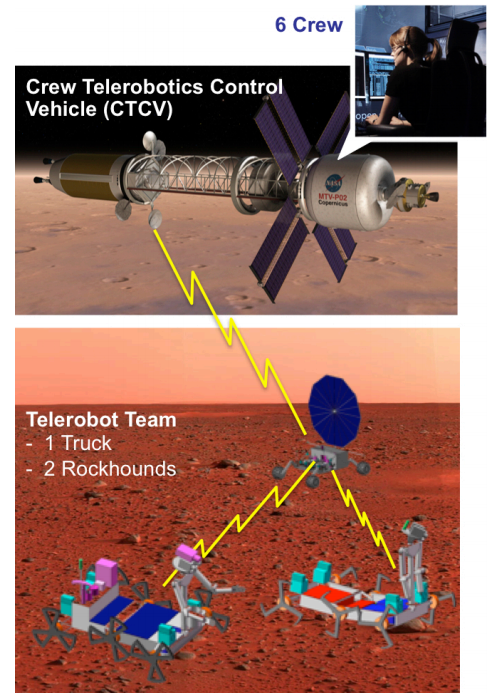
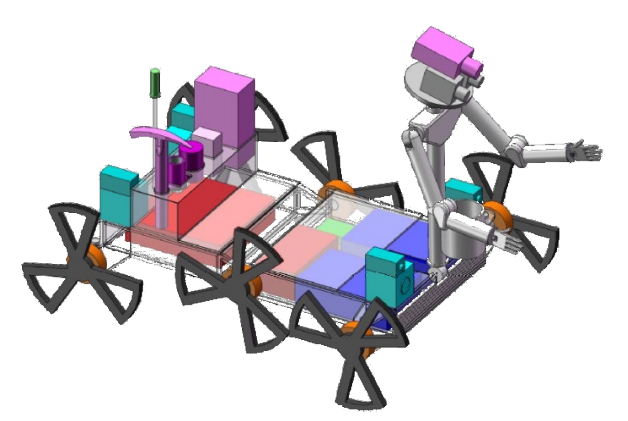
Durante las operaciones en órbita marciana los astronautas harían dos turnos de ocho horas para controlar los tres grupos de vehículos. Cada robot de telepresencia rockhoundsería un auténtico geólogo en miniatura y dispondría de brazos, cámaras en alta definición y varios instrumentos científicos. Dotado de seis ‘rueda-piernas’ o whegs(wheel-legs), podría desplazarse a 10 cm/s y superar pendientes de hasta 45º de inclinación. Para permitir una conducción segura por parte del astronauta, cada rover llevaría cámaras de navegación específicas y un sistema de LIDAR. Los rockhounds se alimentarían mediante baterías y serían recogidos por el vehículo nodriza al terminar cada sesión de telepresencia. Las sondas explorarían áreas interesantes desde el punto de vista científico, como por ejemplo Mawrth Vallis, el cráter Holden, el cráter Eberswalde, el cráter Gale (donde está Curiosity) o los polos marcianos. Los vehículos nodrizas se desplazarían a 3,6 km/h para alcanzar las diversas zonas de interés dentro de cada área, que estarían separadas entre sí unos 20 kilómetros de media. Como alternativa, los robots también podrían participar en una misión de recogida de muestras, considerada por la comunidad científica como la misión prioritaria para estudiar Marte. En este caso, los astronautas regresarían a la Tierra con una preciosa carga de rocas marcianas que incrementaría exponencialmente el atractivo de su misión.
Por supuesto, la estrategia HERRO podría usarse también en Venus y en los asteroides cercanos, no sólo en Marte. En Venus la tripulación también podría controlar mediante telepresencia robots de superficie, aunque en este caso es prácticamente imposible que las sondas aguantasen casi 500 días con las infernales condiciones superficiales del planeta vecino. Como alternativa podrían optar por pilotar dirigibles o aviones a unas alturas donde las condiciones fuesen más benignas. Una misión HERRO típica en Venus requeriría que la tripulación pasase una media de 472 días en órbita. En vez de tres sondas, los astronautas pilotarían cuatro rovers o aeronaves desde la órbita, pero debido a la lenta rotación venusina sólo dos estarían en el hemisferio diurno en un momento dado. Cada 58 días terrestres se intercambiarían las zonas de exploración.

No hace falta ser adivino para saber que las probabilidades actuales de que HERRO se haga realidad son muy bajas. Evidentemente, es más fácil llevar a cabo una misión de este tipo que otra de superficie, ¿pero realmente compensa ir a Marte y no poder ver una huella humana en el planeta rojo? Ese es el verdadero debate.


Comentarios
Publicar un comentario