Oppy supera al Lunojod 2. O la diferencia entre conducir un vehículo en la Luna y en Marte
Ya era hora. Le ha llevado diez años conseguirlo, pero finalmente el rover Opportunity de la NASA ha superado la distancia total recorrida por el Lunojod 2 soviético en 1973. El récord se alcanzó el pasado día 27 de julio, cuando el rover marciano se desplazó 48 metros en un día, alcanzando los 40 kilómetros recorridos en total. De este modo, Oppyse convierte en el vehículo con ruedas que más lejos ha viajado sobre la superficie de otro mundo.
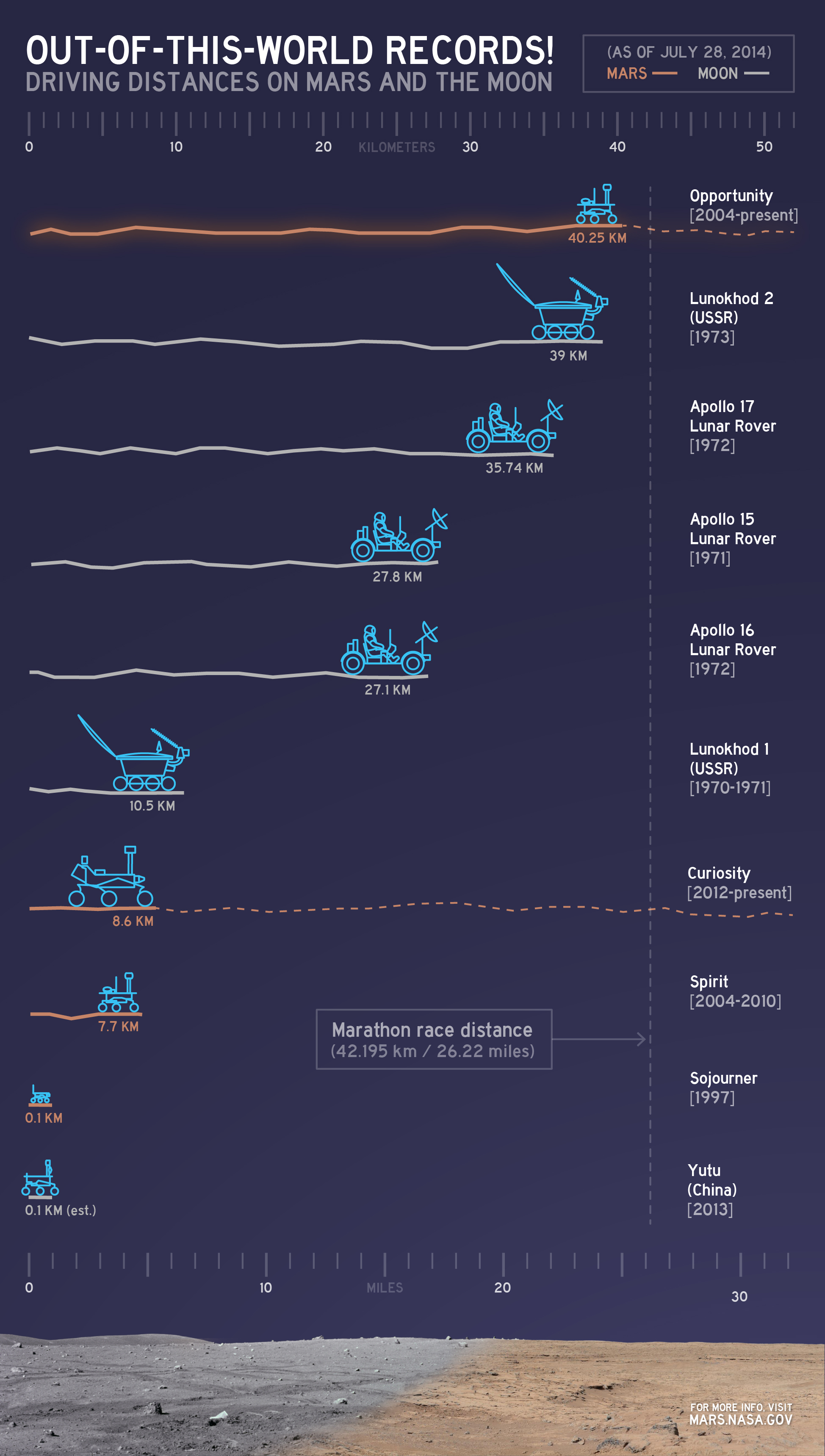
El Lunojod 2 (Ye-8 nº 204) fue el tercer y último vehículo lunar lanzado por la Unión Soviética. El primer Lunojod (Ye-8 nº 201) resultó destruido durante el lanzamiento el 19 de febrero de 1969, mientras que el Lunojod 1 (misión Luna 17) despegó el 10 de noviembre de 1970 y alunizó exitosamente una semana más tarde, funcionando correctamente hasta el 14 de septiembre de 1971. El Lunojod 2 (Luna 21) fue lanzado mediante un Protón-K el 8 de enero de 1973 y aterrizó el 15 de enero de 1973 a las 22:35 UTC en el cráter Le Monnier. Con una masa de 836 kg, el Lunojod 2 sería el vehículo más masivo en posarse sobre otro mundo hasta que Curiosity aterrizó en Marte en 2012. El nuevo rover marciano, con una masa de unos 900 kg, superaba así por poco al veterano explorador soviético.

Por contra, Opportunity (MER-B/MER-1), con una masa de 180 kg, partió hacia Marte el 7 de julio de 2003 y aterrizó en Meridiani Planum el 25 de enero de 2004, convirtiéndose en el tercer rover en recorrer la superficie marciana tras Sojourner y Spirit.
Pero, ¿cómo es posible que Opportunity haya tardado tanto en superar la distancia recorrida por el Lunojod 2? La respuesta la debemos hallar en las diferentes condiciones de las dos misiones espaciales. Los Lunojods eran conducidos en tiempo real desde la Tierra por una tripulación de cinco personas. Es decir, lo que hoy en día llamaríamos ‘telepresencia’. Sin embargo, el retraso en las comunicaciones debido a la distancia que nos separa de Marte hace que sea imposible controlar un vehículo marciano en tiempo real (el retraso puede alcanzar los 40 minutos). Además, los rovers no están en contacto permanente con la Tierra y hay que aprovechar las sesiones de comunicación al máximo (normalmente hay unas dos sesiones usando las sondas Mars Odyssey y MRO). Sólo hace falta echar un vistazo a las instalaciones de control de ambas misiones para entender la diferencia en la filosofía de ambas misiones:

Para ‘conducir’ los rovers marcianos el equipo de tierra planifica una ruta detallada a partir de las imágenes de las cámaras de navegación y panorámicas, normalmente uno o dos días antes. Las instrucciones se mandan al rover y este las cumple diligentemente a no ser que su software detecte algún obstáculo no previsto, en cuyo caso el vehículo se detiene a la espera de nuevas órdenes. Los ordenadores de los rovers marcianos también permiten recorridos ‘automáticos’ de unos cien metros aproximadamente. En estos trayectos el software decide sobre la marcha si es necesario apartarse ligeramente de la ruta programada por los humanos con el fin de evitar rocas, grietas o salientes. Para poder decidir qué acción es la más correcta el rover emplea imágenes de las cámaras de navegación y los datos de las unidades de medida inercial (IMU).
O sea, el ‘conductor’ de Opportunity no dirige el vehículo con un joystick o un volante como si estuviera en un videojuego, sino que usa un ordenador ‘normal y corriente’ para introducir las coordenadas de la trayectoria. La conducción basada en imágenes de Opportunity, denominada ‘odometría visual’, tiene sus limitaciones. El procesador RAD6000 del rover funciona a 200 MHz y necesita unos tres minutos para procesar las imágenes tras recorrer 60 centímetros. Si además el rover se desplaza automáticamente (AutoNav) el tiempo de ejecución se dispara porque el ordenador debe decidir la ruta por sí solo. En AutoNav el rover debe gastar tres minutos de procesado cada 50-150 cm recorridos dependiendo del terreno.

Para saber la trayectoria óptima a seguir, los conductores de la misión usan un software específico del JPL que recrea en 3D el terreno alrededor del vehículo. El programa se usa para planificar la trayectoria y para simular el desplazamiento del rover antes de enviar las órdenes a Marte. El asunto es más complejo de lo que parece porque resulta casi imposible prever los deslizamientos imprevistos de las ruedas (vamos, cuando el rover patina). Si las ruedas se deslizan, el rover podría pensar que ya ha llegado a su destino cuando en realidad no lo ha hecho, de ahí que tenga que confirmar su posición mediante imágenes. Cada secuencia diaria de navegación está formada por varios cientos de líneas de código. A lo largo de los años, Spirit y Opportunity han tenido un gran número de conductores. Entre ellos, podemos mencionar a Brian Cooper, Chris Leger, Eric Baumgartner, Frank Hartman, Jeff Biesiadecki, John Wright, Robert Bonitz, Scott Maxwell y Ashitey Trebi-Ollennu.

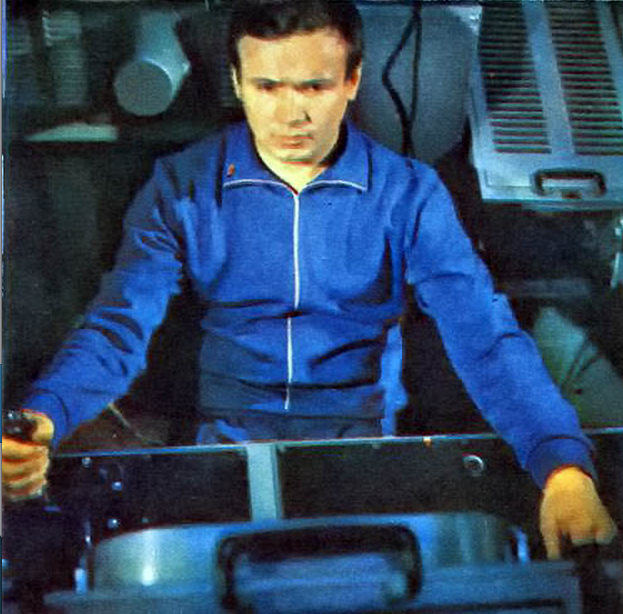
En la Luna el retraso en las comunicaciones apenas es de unos cinco segundos, por lo que es posible mantener una comunicación constante con una sonda que se halle en la superficie usando dos estaciones de comunicaciones como mínimo. Por este motivo los Lunojods eran conducidos ‘de verdad’ mediante una consola con joysticks. Además del conductor, cada tripulación estaba formada por otras cuatro personas: el comandante (que decidía qué había que hacer en cada momento), el navegante (encargado de controlar la posición del vehículo y de decidir hacia dónde debía dirigirse), el ingeniero (encargado de vigilar el correcto funcionamiento de los sistemas) y el operador de la antena de alta ganancia (encargado de que la antena apuntase correctamente a la Tierra constantemente para garantizar la buena recepción de las imágenes de televisión). El operador de la antena también servía como conductor de reserva.
El conductor podía ver el paisaje lunar gracias a tres cámaras de televisión (dos en el Lunojod 1) que enviaban una imagen cada 3,2 segundos. Esto permitía mover el vehículo a una velocidad máxima de 0,8-2 km/h, que puede no parecer mucho, pero comparados con los 0,135 km/h de Opportunity es una diferencia considerable. Más aún si tenemos en cuenta que los MER Spirit y Opportunity prácticamente nunca han alcanzado esa velocidad máxima y en realidad se han movido a unos 0,036 km/h de media.

Otra diferencia entre los vehículos tiene que ver con el día y la noche. El día en Marte tiene una duración muy similar al terrestre, pero el planeta tarda unos 40 minutos más en dar una vuelta sobre su eje. El efecto de este desfase es que el control de la misión realiza turnos no muy largos (de noche se suspenden las operaciones del rover), pero su horario se va desfasando poco a poco con respecto a la hora local (que es la de California). El estrés de vivir bajo el ‘horario marciano’ es tan alto que los equipos de los rovers de la NASA vuelven al horario local tras los primeros meses de trabajo. Aunque de esta forma no se aprovecha plenamente el tiempo disponible cada día marciano, al menos los trabajadores no se vuelven locos con el desajuste horario.

En la Luna el día dura dos semanas, así que las dos tripulaciones del Lunojod podían turnarse para sacar el máximo provecho a la misión, parando ocasionalmente para refrescarse y, de paso, permitir que las baterías del vehículo se recargasen. Durante la noche lunar las operaciones del rover se detenían y la temperatura se mantenía dentro de unos límites aceptables gracias a un calefactor a base de polonio-210 radiactivo. Los rovers marcianos también logran controlar su temperatura usando calefactores radiactivos (RHUs), aunque a base de plutonio-238 en vez de polonio (la vida media el plutonio es muy superior, lo que resulta imprescindible para misiones de larga duración). La primera tripulación del Lunojod estaba formada por Nikolái Yeremenko (comandante), Gabduljai Latypov (conductor), Konstantin Davidovski (navegante), Leonid Mosenzov (ingeniero) y Valeri Sapranov (operador de la antena). La segunda tripulación estaba compuesta por Ígor Fyodorov (comandante), Vyacheslav Dovgan (conductor), Vikenti Samal (navegante), Albert Kozhebnikov (ingeniero) y Nikolái Kozlitin (operador de la antena). Vasili Chubukin sirvió de reserva. Las tripulaciones dirigían los Lunojods desde el centro de comunicaciones de la base de Shkolnaya en Crimea.


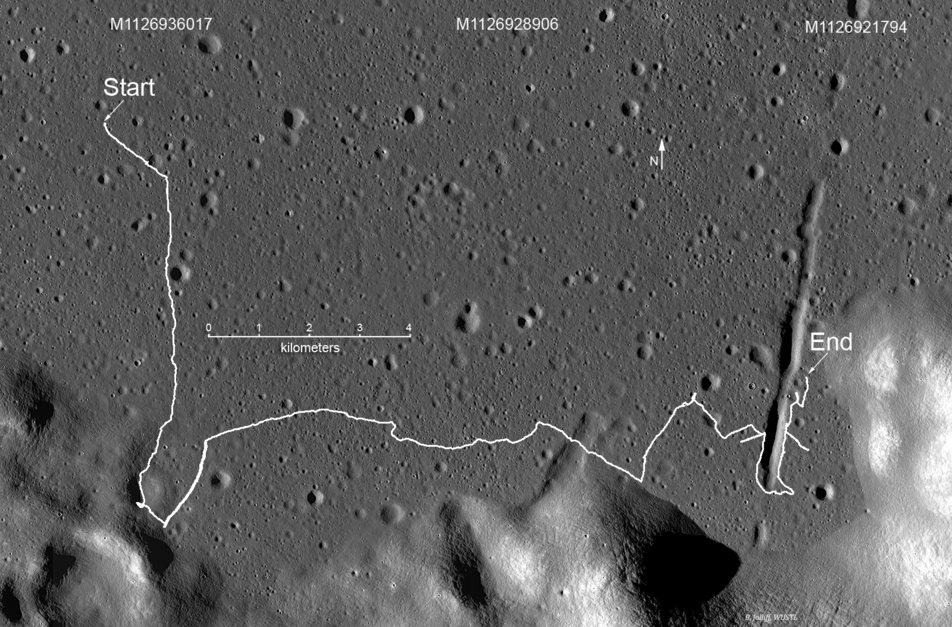
El resultado es que Opportunity ha tardado una década en recorrer 40 kilómetros, mientras que el Lunojod 2 apenas tardó cuatro meses en desplazarse 39 kilómetros. La pérdida del Lunojod 2 fue anunciada el 3 de junio de 1973. El polvo acumulado en la tapa superior con los paneles solares se depositó sobre los radiadores del vehículo cuando la tapa se cerró para proteger al Lunojod de la fría noche lunar. Al abrirse la tapa una vez finalizada la noche lunar, el Lunojod fue incapaz de regular su temperatura correctamente y dejó de funcionar. Para entonces había enviado más de 80 000 imágenes de televisión y 86 panoramas fotográficos. Curiosamente, hasta hace pocos años se pensaba que el Lunojod 2 había recorrido 37 kilómetros, no 39. La cifra actual ha sido calculada midiendo la longitud de las huellas que el Lunojod 2 dejó en la superficie lunar y que la sonda LRO de la NASA ha podido fotografiar en detalle recientemente.
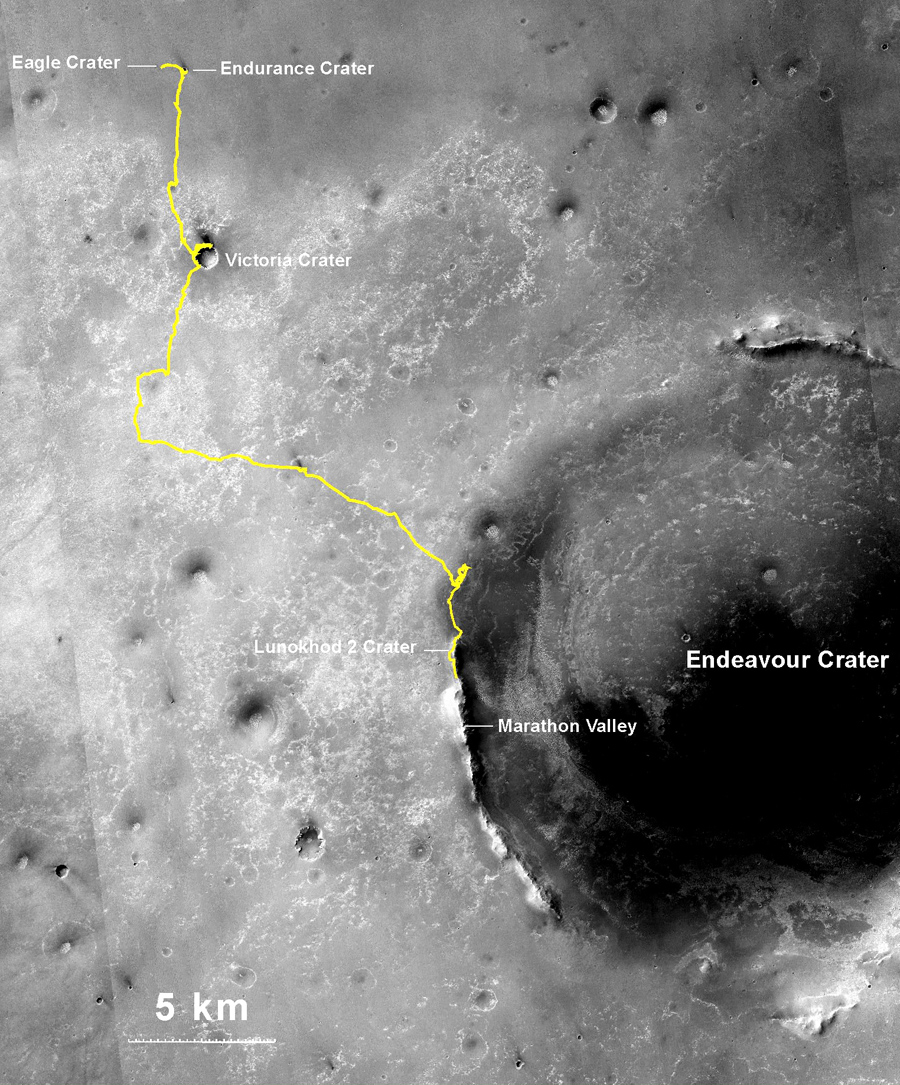
Pero es de bien nacidos ser agradecidos, así que el equipo de Opportunity ha decidido bautizar un cráter recientemente explorado por el rover con el nombre de Lunojod 2. Qué mejor tributo para recordar a este viejo explorador. Actualmente, y a pesar de los achaques, Oppy sigue trabajando en el borde del cráter Endeavour y tiene previsto explorar el ‘valle Maratón’, llamado así porque durante su estudio el pequeño robot superará la distancia recorrida en una maratón.


Comentarios
Publicar un comentario